Biomedical Engineering Reference
In-Depth Information
2.6
2.4
1000
0
2.2
2
1.8
100
1.6
1.4
1
1.2
1
ignored
0.8
15
10
5
0
5
10
15
−
−
−
X Rotation (degrees)
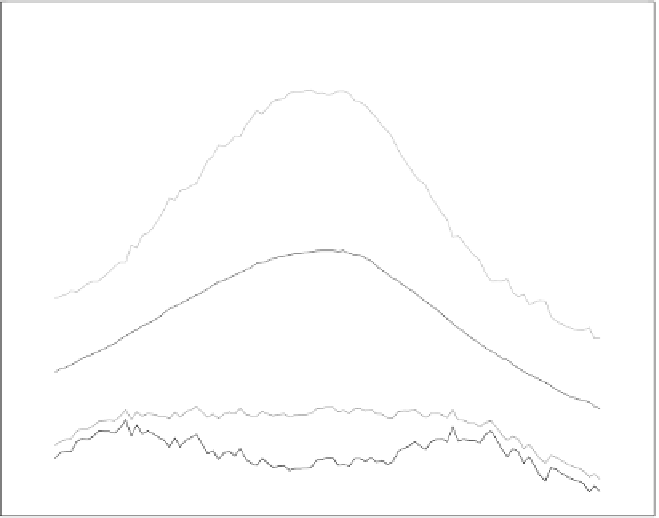
Figure 10.9: The reversed cross-entropy profiles of an MR/Em image pair in
the vicinity of a manual registration when the x-rotation angle changes inde-
pendently. The numbers adjacent to the profiles indicate the
α
value used to
compute a small probability value which is used to replace zero pdfs. The bot-
tom profile represents the case where the contribution from zero joint pdfs was
ignored in the profile computation.
there is not even a peak around the manual registration. These two undesirable
features render the reversed cross-entropy measure unsuitable as a registration
measure if the zero pdfs are ignored. If the zero pdfs are taken into account and
as
α
increases, the profiles become smooth and then rough again. It seems that
α
=
100 is a reasonable choice, which gives a relatively smooth profile. When
α
is small, the extraneous pdfs replacing the zero pdfs causes the summation
of the pdfs to significantly deviate from unity. Therefore, a small
α
is not ideal.
When
α
is large, the contribution of each extraneous pdf becomes dominant,
the total reversed cross-entropy increases, and the contribution from nonzero
pdfs is diminished gradually. The latter behavior makes a large
α
not ideal either.
When
α
=
100, the summation of all pdfs, including the extraneous ones, is at