Biomedical Engineering Reference
In-Depth Information
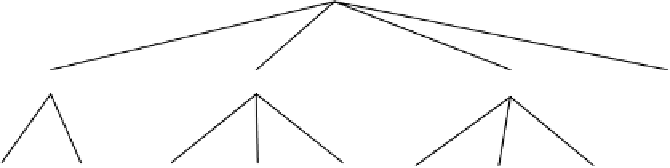
Warp space
local
semi-local
global
image dependent
PDE
variational
quadtree
B-splines
wavelets
linear
polynomial
harmonic
RBF
Figure 9.5:
Simplified classification of registration algorithms according to the
warp space used.
9.2.1.1
Pixel-Based Registration
Pixel-based algorithms work directly with the (totality of) pixel values of the
images being registered.
Preprocessing
is often used to suppress the adverse
effects of noise and differences in acquisition [6], or to increase or uniformize
pixel resolution [7]. In the continuous framework, images are often considered
as functions of the continuous image coordinates, providing a consistent ap-
proach to the discretization issues. The correspondence between the discrete
and continuous versions of the image is established using
interpolation
. The
crudest method is the nearest-neighbor interpolation, the most often used is
the linear (resp. bi- or trilinear) interpolation. Among the high-end methods,
B-spline interpolation
[8-10] provides the best trade-off between accuracy and
the computational cost [11, 12].
The image model may also live in a higher-dimensional space than the original
data, such as when representing 2D image as a surface in a 3D space [13], or
using
level sets
[14].
9.2.1.2
Transform-Based Registration
Transform-based algorithms exploit properties of the
Fourier
,
wavelet
,
Hadamard, and other transforms, making use of the fact that certain deforma-
tions manifest themselves more clearly in the transform domain. These methods
are used mainly in connection with linear deformation fields. Nevertheless, there
are examples of methods that estimate locally linear optical flow using
Gabor
filters
[15,16],
B-splines
[17] and
wavelets
[18]. The transforms are usually linear
and independent of the actual image contents.