Biomedical Engineering Reference
In-Depth Information
In the first step, some intermediate data is extracted from the two images
being registered. This data lives in a
feature space
.
The algorithm's representation of the correspondence between the two
images is taken from a
search space
. This is the space in which the algo-
rithm looks for a solution. An element from this space is returned at the
end.
To find the solution in the search space, the algorithm needs a way to
measure the quality of the correspondence for different points in this space.
This measure is provided by a
cost function
.
Finally, the
search strategy
governs the movements of the algorithm in the
search space in its quest for the optimum.
We classify existing registration algorithms according to their choice of the
above four attributes, similarly as in [5]. We shall concentrate mostly on their
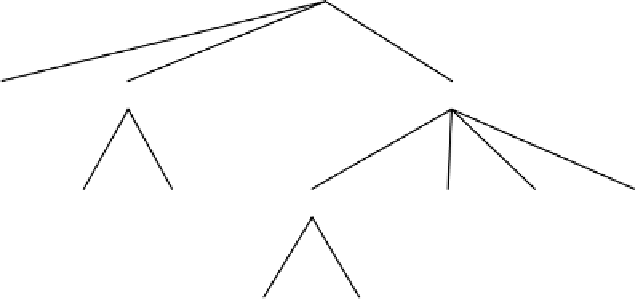
biomedical applications. Figures 9.4 and 9.5 show the simplified classification
according to the first two attributes in a tree form.
9.2.1
Feature Space
According to the feature space employed, we can identify three classes of reg-
istration algorithms:
pixel-based
,
transform-based
, and
feature-based
.
Feature space
pixels
features
transforms
landmarks
curves
surfaces
templates
Fourier
wavelet
intrinsic
extrinsic
Figure 9.4:
Simplified classification of registration algorithms according to the
feature spaces used.