Biomedical Engineering Reference
In-Depth Information
are below the required tolerance, the triangle is not subdivided. Otherwise, the
voxel that is farthest from the triangle is connected to the three vertices of the
triangle to obtain three smaller triangles. This is depicted in Fig. 7.4d. The reason
for subdividing the edge contours first is to avoid very long and narrow triangles
in the final subdivision.
By subdividing a triangle, finer triangles are obtained. The process is repeated
until distances of all shape voxels to the associating triangles become smaller
than the required tolerance. Note that this subdivision is performed in parallel in
the sphere as well. Therefore, whenever a triangle in the shape approximation
is subdivided, the corresponding triangle in the sphere approximation is also
subdivided. For that reason, there always exists a one-to-one correspondence
between triangles in the shape approximation and triangles in the sphere ap-
proximation. By knowing the parameters of mesh vertices in the sphere, we will
know the parameters of corresponding mesh vertices in the shape. This process
assigns spherical parameters to the mesh vertices approximating the shape. The
process is graphically shown in Fig. 7.5. The only requirement of the described
parametrization is for the given shape to have spherical topology.
By knowing the parameters at vertices of a triangle, parameters at points
inside the triangle can be computed from barycentric coordinates [16] of
parameters at the vertices. Parameters of voxels in a triangular patch are ob-
tained by projecting the voxels to the associating triangle and assigning param-
eters of the triangle points to the voxels. If a triangular patch does not fold over,
(a)
(b)
(c)
(d)
(e)
(f )
(g)
(h)
(i)
(j)
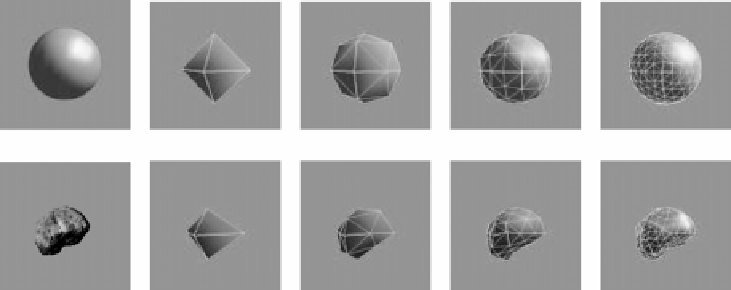
Figure 7.5:
(a) A sphere. (b-e) Subdivision of the sphere. (f) A digital shape.
(g-j) Subdivision of the shape. The shape and the sphere are subdivided in
parallel.