Biomedical Engineering Reference
In-Depth Information
(a)
(b)
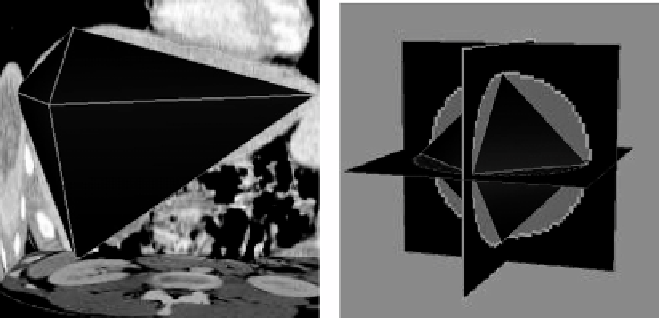
Figure 7.2:
(a) Approximation of a digital shape by an octahedron. (b) Ap-
proximation of a sphere by an octahedron. Parameter coordinates of octahedral
vertices in the sphere are assigned to the octahedral vertices in the shape.
with the obtained intersection points. The center of the octahedron is placed at
the center of gravity of the shape and its axes are aligned with the axes of the
shape [10]. If the shape is very irregular so that the center of gravity of the shape
falls outside the shape, the intersection of the major axis of the shape with the
shape is found and the midpoint of the longest segment of the axis falling inside
the shape is taken as the center of the octahedron.
Next, the voxels associated with each triangle in the octahedral approxima-
tion are determined. This is achieved by finding the bisecting plane of each octa-
hedral edge and determining the shape voxels that lie in that plane. In Fig. 7.3b,
the bisecting planes passing through the edges of a triangle and intersecting the
shape are shown. The bisecting plane passing through each octahedral edge and
intersecting the shape will be an edge contour. A triangle, therefore, produces
three edge contours that start and end at the vertices of the triangle and enclose
the shape voxels that belong to that triangular face in the octahedral approxima-
tion. The triangles obtained in the octahedral subdivision are entered into a list.
After this initial step, a triangle is removed from the list and is subdivided into
smaller triangles and the triangles whose distances to the associating triangular
patches are larger than a given tolerance are again entered into the list. In this
manner, the triangles are removed from the list, one at a time, and processed
until the list becomes empty.