Biomedical Engineering Reference
In-Depth Information
These transitivity relationships are illustrated in Fig. 6.2. Assume that
the points
x
,
y
, and
z
correspond to the same landmark in images
A
,
B
, and
C
, respectively. Assume that the set of transformations
H
={
h
AB
,
h
BA
,
h
BC
,
h
CB
,
h
AC
,
h
CA
}
has the invertibility and transitivity properties such
that
y
=
h
BA
(
x
)
,
z
=
h
CB
(
y
)
,
x
=
h
AC
(
z
)
.
Substituting the first equation into the second and the second into the third
equation gives the result
x
=
h
AC
(
h
CB
(
h
BA
(
x
)))
.
The average transitivity error is defined as
1
M
E
ATRAN
(
h
AB
,
h
BC
,
h
CA
,
M
)
=
M
||
h
AB
(
h
BC
(
h
CA
(
x
)))
−
x
||
dx
(6.8)
and the maximum transitivity error is defined as
E
MTRAN
(
h
AB
,
h
BC
,
h
CA
,
M
)
=
max
x
∈
M
||
h
AB
(
h
BC
(
h
CA
(
x
)))
−
x
||
.
(6.9)
Equations (6.8) (6.9) are discretized for implementation.
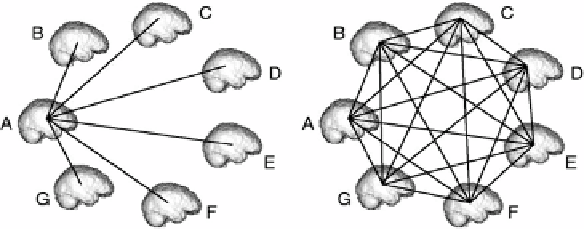
Figure 6.3 demonstrates an advantage of producing transformations that
satisfy the transitivity property. The left panels show that the minimum num-
ber of invertible transformations required to map information from one coordi-
nate system to another is
N
−
1 where
N
is the number of image volumes. The
Figure 6.3:
The left panel shows the minimum number of pairwise transfor-
mations needed to map a point from one brain to its corresponding location
in another. The right panel shows all of the pairwise mappings between the
brains.