Hardware Reference
In-Depth Information
The SIMD processing requirements within the SMs place constraints on the
kind of code programmers can run on these units. In fact, each CUDA core must be
running the same code in lock-step to achieve 16 operations simultaneously. To
ease this burden on programmer, NVIDIA developed the CUDA programming lan-
guage. The CUDA language specifies the program parallelism using threads.
Threads are then grouped into blocks, which are assigned to streaming processors.
As long as every thread in a block executes exactly the same code sequence (that
is, all branches make the same decision), up to 16 operations will execute simultan-
eously (assuming there are 16 threads ready to execute). When threads on an SM
make different branch decisions, a performance-degrading effect called branch
divergence will occur that forces threads with differing code paths to execute seri-
ally on the SM. Branch divergence reduces parallelism and slows GPU processing.
Fortunately, there is a wide range of activities in graphics and image processing
that can avoid branch divergence and achieve good speed-ups. Many other codes
have also been shown to benefit from the SIMD-style architecture on graphics
processors, such as medical imaging, proof solving, financial prediction, and graph
analysis. This widening of potential applications for GPUs has earned them the
new moniker of
GPGPU
s(
General-Purpose Graphics Processing Units
).
Threads
16-KB
Shared
Memory
48-KB
Shared Memory
or L1 Cache
16-KB
L1
Cache
768-KB
L2 Cache
DRAM
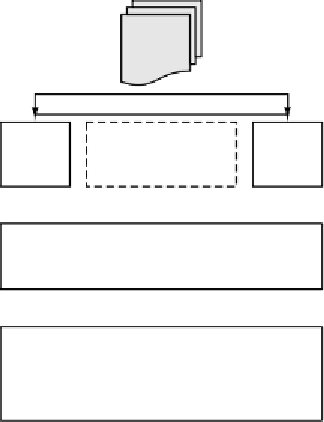
Figure 8-18.
The Fermi GPU memory hierarchy.
With 512 CUDA cores, the Fermi GPU would grind to a halt without signifi-
cant memory bandwidth. To provide this bandwidth, the Fermi GPU implements a
modern memory hierarchy as illustrated in Fig. 8-18. Each SM has both a dedicat-
ed shared memory and a private level 1 data cache. The dedicated shared memory