Graphics Reference
In-Depth Information
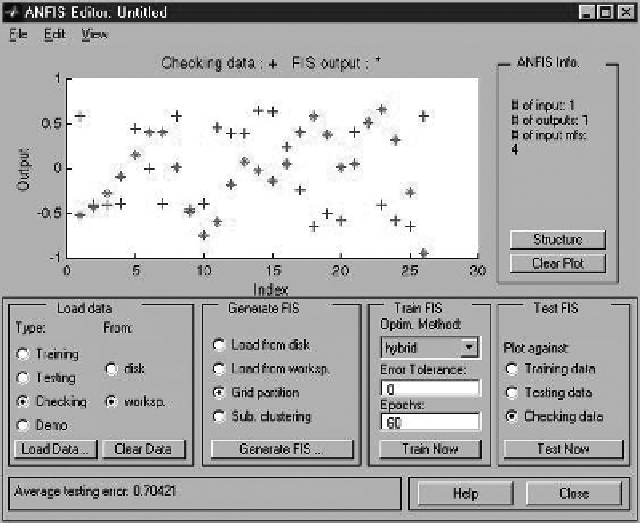
FIGURE 6.3
(See colour insert.)
ANFIS editor graphical user interface in Simulink/MATLAB.
In contrast to the fuzzy controller design process in which the user selects the
membership functions, the adaptive neuro-fuzzy inference system (ANFIS) is
capable of constructing a fuzzy system whose membership function parameters are
tuned via a back-propagation algorithm alone or in combination with a least squares
method by using a specific input-output dataset. In other words, the resultant ANFIS
embodies the modelling of the plant process through the construction of membership
functions and their inherent relationships. Figures 6.3 and 6.4 show the graphical
user interface of the ANFIS tool in Simulink/MATLAB.
The process of constructing an ANFIS control system is similar to constructing
a fuzzy controller except that the plant model is not used explicitly. From the same
input-output data set collected, a portion is allocated for training while the rest is
used for validation. After the ANFIS parameters such as the numbers of inputs,
outputs, and membership functions are set by the user, the software computes the
ANFIS structure that may be imported into a simulation environment for testing
with the actual process. Figure 6.5 illustrates the control system design.
6.4 EXPERIMENT
We designed two experiments to validate our control system framework using
a fuzzy controller. As in the previous chapter's experiments, our first experiment
was performed in a fully synthetic simulation environment. The second experiment
involved switching the plant with the actual rendering process.
Search WWH ::

Custom Search