Graphics Reference
In-Depth Information
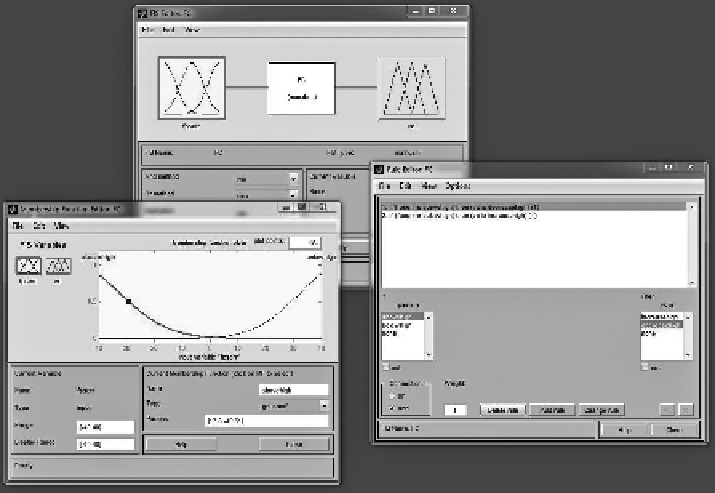
FIGURE 6.2
(See colour insert.)
Configuring fuzzy controller in Simulink/MATLAB.
characteristics to their membership functions. Thereafter, each input membership
function is mapped to rules that are correlated to a set of output characteristics.
Finally the output is determined by traversing the relationship between the output
characteristics and the output membership functions such that a crisp or single-valued
output is produced.
One key element in a fuzzy control system is the use of fixed membership func-
tions that were chosen arbitrarily. In other words, the applied fuzzy inference is
applied only to systems whose rule structures are essentially predetermined by the
user's understanding and interpretation of the characteristics of the variables in the
system model.
Nevertheless, it is possible that collection of input and output data is available for
modelling but it is not clear to the user whether a predetermined model structure may
be appropriate based on the characteristics of the variables in the system. In certain
modelling situations, it may not be possible to discern the correct membership func-
tions to adopt by simply observing input and output data. Based on these scenarios,
we approached the model-less control problem by using the adaptive neuro-fuzzy
inference technique.
In brief, the neuro-adaptive learning technique that performs similarly to neural
networks provides a method for a fuzzy modelling procedure to learn information from
an input-output data set. By using the fuzzy logic toolbox in Simulink/MATLAB,
it is possible to compute the membership function parameters that best allow the
associated fuzzy inference system to track the given input-output data.
Search WWH ::

Custom Search