Graphics Reference
In-Depth Information
this correspondence in the case of a curve. This means that if two points
p
and
q
are
close, then the map
-1
p
=
p
p
p,q
q
p
is a well-defined bijection between a neighborhood of the origin in
T
p
and a neigh-
borhood of the origin in
T
q
. We can use this map to set up a correspondence between
ordered bases in the two tangent spaces. In this way we can compare orientations,
and we say that the orientations in O vary continuously if for nearby points s
p
and
s
q
correspond under p
p,q
. An
oriented surface
is a pair (
S
,O), where
S
is a surface and
O an orientation for
S
.
1.7
Convex Sets
Definition.
A subset
X
of
R
n
is said to be
convex
if, for every pair of points
p
and
q
in
X
, the segment [
p,q
] is entirely contained in
X
.
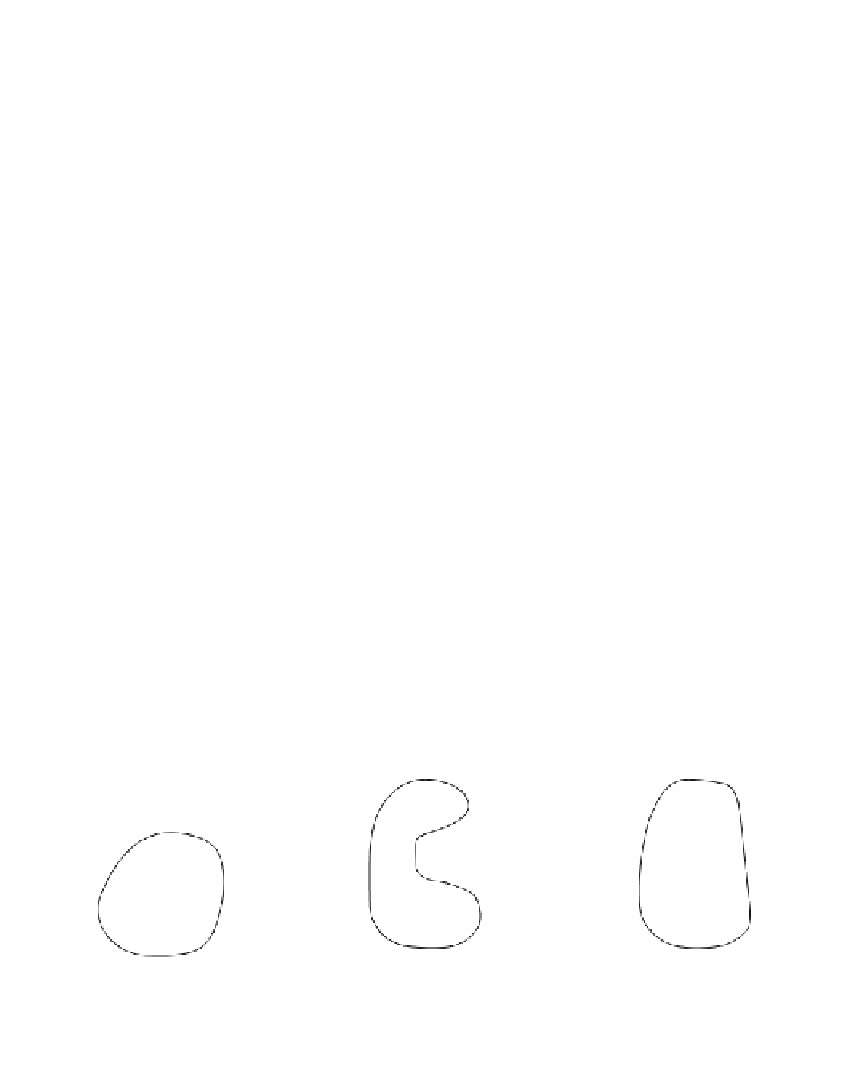
Examples of convex and nonconvex sets are shown in Figure 1.15(a) and (b),
respectively. The next proposition lists some basic facts about convex sets.
1.7.1. Proposition.
(1) Both the empty set and
R
n
are convex.
(2) Each halfplane in
R
n
is convex.
(3) The intersection of an arbitrary number of convex sets is convex.
Proof.
Part (1) is trivial and parts (2) and (3) are left as exercises for the reader
(Exercise 1.7.1 and 1.7.2).
Because convex sets have many nice properties, it is convenient to introduce the
notion of the smallest convex set that contains a set.
convex set
non-convex
set
convex hull
of (b)
(a)
(b)
(c)
Figure 1.15.
Convex and nonconvex sets and a convex hull.