Graphics Reference
In-Depth Information
Our next task is to show that working with generalized central projections is just
as easy as with ordinary central projections. We extend the notion of a frame and
borrow some of the next terminology from computer graphics.
Definition.
A
generalized frame
in
R
n
is a tuple F = (
u
1
,
u
2
,...,
u
k+1
,
p
), where the
u
i
form an orthonormal set of vectors in
R
n
and
p
is point of
R
n
. The (n - k - 1)-
dimensional plane
B
for which F is a point-normals representation is called the
base
plane
of F and denoted by base(F). If
u
k+2
,
u
k+3
,..., and
u
n
are an orthonormal basis for
B
, then the frame G = (
u
1
,
u
2
,...,
u
n
,
p
) is called an
augmented frame
for F. The vector
u
k+1
is called the
view direction
of F. Any k-dimensional plane
V
that passes through a
point
o
=
p
+ d
u
k+1
, for some d > 0, and has basis
u
1
,
u
2
,..., and
u
k
is called a
view plane
for F. The view plane
V
is said to be a
distance d in front of
B
. The frame (
u
1
,
u
2
,...,
u
k
,
o
)
is called the
view plane coordinate system
and the point
o
is called the
origin
of the view
plane.
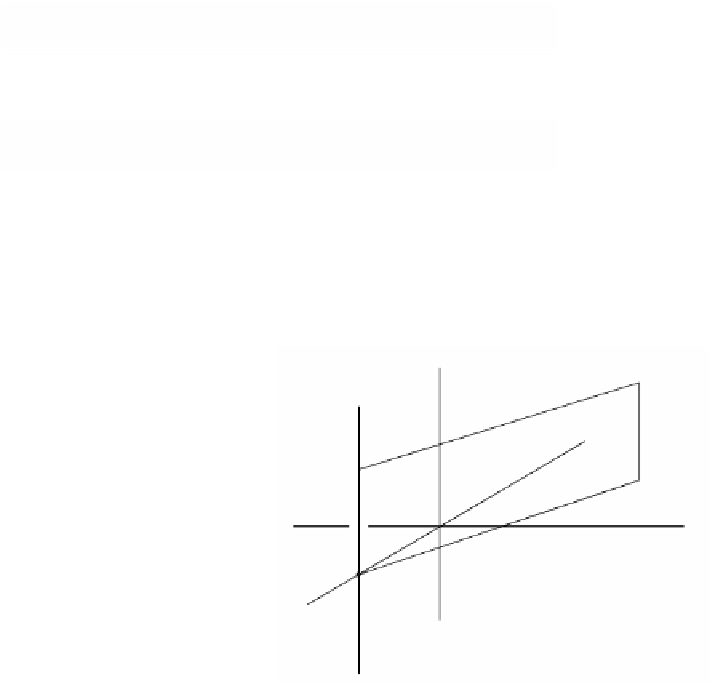
Before moving on to the general case, it is helpful to work out the computational
details in the special case of
R
3
. Assume that
p
= (0,-1/a,0), F = (
e
1
,
e
2
,
p
), and that the
view plane
V
is the x-axis and has origin
0
. See Figure 3.30. By an argument similar
to the one in Section 3.5.1 one can easily show that the generalized central projection
with respect to F and
V
3
Æ
C
a
:
RV
is defined by
x
ay
Ê
Ë
ˆ
¯
(
)
=¢
(
)
=
Cxyz
,,
x
,,
00
,, .
00
a
+
1
The map C
a
can also be described as an orthogonal projection parallel to the z-axis
to the x-y plane followed by an ordinary central projection of
R
2
onto the x-axis from
z
(x,y,z)
B
y
(x,y,0)
x
V
(x¢,0,0)
(0,-1/a,0)
Figure 3.30.
A basic generalized central
projection in
R
3
.