Information Technology Reference
In-Depth Information
problem, the completion time of the hierarchical controller is the same as of
the heuristic controller. In the hierarchical controller, both the QC and the
ASC do not need to work at their maximal speed without loss of changes on
makespan. The transport time of the QC and the ASC are determined by the
synchronization among different pieces of equipment.
Tables 3 and 4 present the energy consumption of each task associated to the
piece of equipment by the hierarchical controller and the heuristic controller. In
each task, one piece of equipment moves between the loading and the unloading
place. It is noticeable that the unit energy consumption regarding both the QC
and the ASC is reduced when the hierarchical controller is employed. Apart from
the QC and the ASC, the unit energy consumption of the AGV by the proposed
hierarchical is the same as the unit energy consumption obtained by the heuristic
controller. The reason for this is that the AGV is the bottleneck in the transport
of containers, considering the transport time of AGV determines the completion
of transporting containers. In this sense, the QC and ASC does not need to work
at its maximal speed between the unloading and unloading place. In the heuristic
approach, each piece of equipment was working at its maximal speed. There is no
energy consumption considered in the heuristic approach. Fig. 7 and Fig. 8 show
100
50
0
0
50
100
150
200
250
300
350
400
Time (s)
300
200
100
0
0
50
100
150
200
250
300
350
400
Time (s)
100
50
0
0
50
100
150
200
250
300
350
400
Time (s)
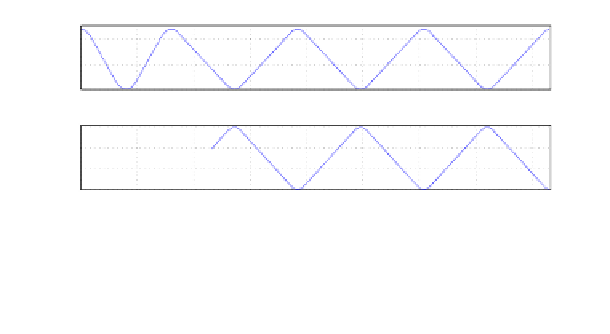
Fig. 7.
The simulation results with respect to the position of three pieces of equipment
by the hierarchical controller architecture
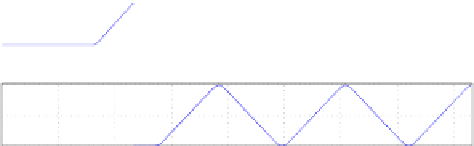
the behaviors of QC, AGV and ASC with respect to the position and the velocity
determined by the hierarchical controller. Fig. 7 indicates these three pieces of
equipment are well synchronized. Fig. 8 also presents the synchronization of
these three pieces of equipment. It is seen from Fig. 8 that both the QC and the
AGV were operated at their maximal operational conditions, i.e., the maximal
velocity and the maximal acceleration, before the interaction of three pieces of
equipment. When these three pieces of equipment are synchronized, the QC and
the ASC were not working at their maximal speed to save energy consumption
while the AGV was running at its maximal working condition.