Biomedical Engineering Reference
In-Depth Information
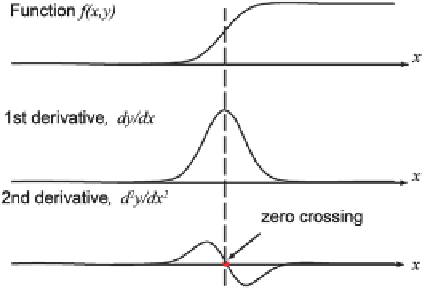
Fig. 3.5
First-order and
Second-order derivatives
of a function applied to an
edge shown by the jump in
intensity
of data to analyse and filters out useless information, while preserving the impor-
tant structural properties in an image.
Ideally, an edge is one that has a discontinuity or a large change in greyscale
intensity between neighbouring pixels. The salient feature of edge detection algo-
rithms is the use of a derivative operator to determine and amplify the intensity
change (Fig.
3.5
). There are a number of algorithms for this, but these may be clas-
sified as either:
•
derivative based
—where the first derivative of the intensity change is greater in
magnitude than a specified threshold or
•
gradient based
—to find regions where the second derivative of the intensity has
a zero crossing (i.e. a point where the sign of a function changes from positive to
negative or vice-versa and represented by a crossing of an axis with zero value).
In gradient based edge detection a gradient of consecutive pixels is taken in both
x
and
y
direction.
From a graphical point of view, consider an edge which has a one-dimensional
shape of a ramp and is depicted with a jump in intensity (Fig.
3.5
). Taking the first
derivative shows a maximum at the centre of the edge of the original function. This
is the derivative based method which identifies a pixel as an edge location if the
value of
dy/dx
exceeds some threshold. Since edges have higher pixel intensity val-
ues than its neighbours, you can set a threshold and compare the
dy/dx
value to find
those values that exceed the threshold to detect edges. Taking the second derivative
gives a zero at the maximum or turning point of the first derivative. As a result the
gradient based method involves finding an edge based on the zero crossing in the
second derivative curve. Taking the first and second order on each individual pixel
of an image can be computationally intensive and hence impractical. A kernel (or
mask), which is a small matrix itself, can be used to pass over an image to obtain an
approximate derivative value.
First-order derivative (derivative based) algorithms include the
Sobel,
Rob-
erts
, and the
Prewitt
edge detectors that perform a 2-D spatial gradient measure-
ment on an image. It is used to find the approximate absolute gradient magnitude
at each point in an input grayscale image. The Prewitt detector can detect more
edges but produces somewhat noisier results compared with the Sobel detector. For
Search WWH ::

Custom Search