Biomedical Engineering Reference
In-Depth Information
40.00
35.00
30.00
25.00
20.00
15.00
10.00
5.00
0.00
(a)
(b)
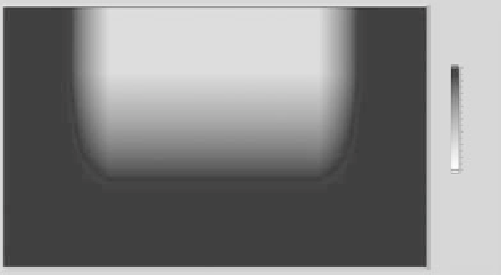
Figure 8.12
Grasper is touching two different objects (with softnesses of 30 and 10 Shore A).
One embedded object is located on top. (a) Tactile image display. (b) Photograph of the grasper
and elastomers
8.3.1 Sensor Structure
The details of the sensor, including its design and working concept, have already been
presented in Chapter 4. The design of the deformable force-stretch array sensor is shown
in Figure 8.14a. The structure of the sensor, integrated with an MIS grasper as shown
in Figure 8.14b, is corrugated to ensure firm grasping of the tissue. Figure 8.14b shows
the proposed grasper in which only the lower jaw is equipped with an array of tactile
sensors. The sensor array consists of seven equally spaced PVDF films which are placed in
parallel on an elastic material. The number of sensors, their length, width, and thickness,
as well as the space between them, could be optimized for each particular application. In
this study, in order to replicate the spatial resolution of a human finger, the sensor array
comprised seven equally spaced piezoelectric PVDF base sensing elements.
The spatial resolution for a human finger, using the two-point discrimination threshold
(TPDT), is reported to be about 2 mm [4]. Therefore, 1.5 mm wide sensing elements
positioned 0.5 mm apart were considered for this study although, evidently, a finer array
would yield an even better spatial resolution than that of a human finger. The PVDF can