Biomedical Engineering Reference
In-Depth Information
40.00
35.00
30.00
25.00
20.00
15.00
10.00
5.00
0.00
(a)
(b)
(c)
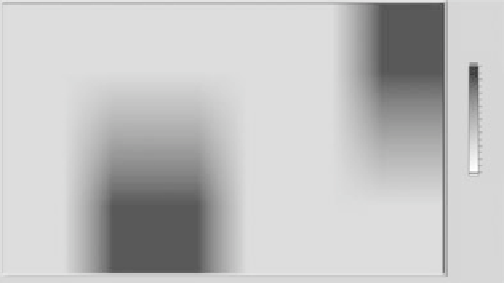
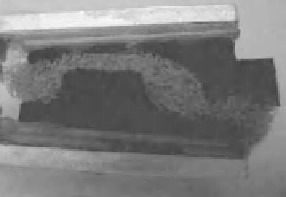
Figure 8.13
Grasper is touching two different objects (with softnesses of 30 and 10 Shore A).
Two embedded objects are located on the top and bottom. (a) Tactile image display. (b) Photograph
of the grasper and elastomers. (c) Grasped object with two different soften
be modeled as a voltage source with very high output impedance and, since the DAQ
card requires that the input impedance be less than 100 k
, a buffer is necessary to match
the impedance. Since the sensor consists of seven PVDF films, a total of seven analog
input voltages are registered. The detailed electronic connections, from the PVDF to the
differential DAQ amplifier (instrumentation amplifier), are shown in Figure 8.15.
8.3.2 Rendering Algorithm
Two configurations of the sensors on the grasper are examined. The grasper structure
shown in Figure 8.14, with only one sensorized jaw, is capable of locating lumps in one
dimension (
x
-axis), while the grasper with two sensorized jaws (which is described later
in this chapter) can characterize the lumps in two dimensions,
x
and
y
axes (location of the