Biomedical Engineering Reference
In-Depth Information
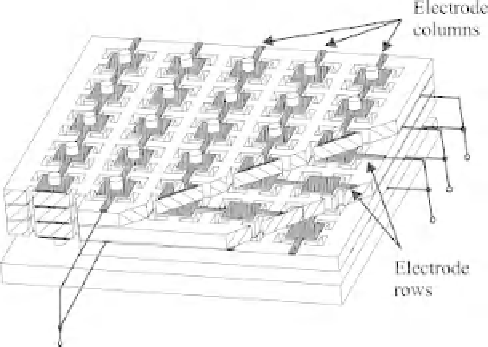
Figure 7.5
Planar stimulator arrangement for a tactile display [15]
Yamamoto worked on a tactile display in which electrostatic force and friction control
were developed for presenting surface roughness sensations [16 - 18]. The device consists
of stator electrodes and a thin film slider upon which an aluminum conductive layer is
deposited. The user puts his index finger on the slider and moves it horizontally to obtain a
certain tactile sensation. By applying various voltage patterns to stator electrodes, various
friction distributions can be generated on the slider which, in turn, is transferred to the
fingertip, so as to generate surface roughness sensation.
7.3.2 Rheological Tactile Displays for Softness
ERFs experience dramatic changes in rheological properties, such as viscosity, in the
presence of an electric field. This was first explained by Willis Winslow in 1947 using oil
dispersions of fine powders [19]. The fluids are made from suspensions of an insulating
base and particles of the order of 0.1 to 100 μm (in size). The volume fraction of the
particles is between 20 and 60%. The electrorheological effect, sometimes called the
Winslow effect, is thought to arise from the difference in the dielectric constants of the
fluid and particles. In the presence of an electric field, due to an induced dipole moment,
the particles will form chains along the field lines, as shown in Figure 7.6.
Without field
With field
Figure 7.6
Particle suspension forms chains when an electric field is applied [20] (©
Institute of
Physics and IOP Publishing)