Cryptography Reference
In-Depth Information
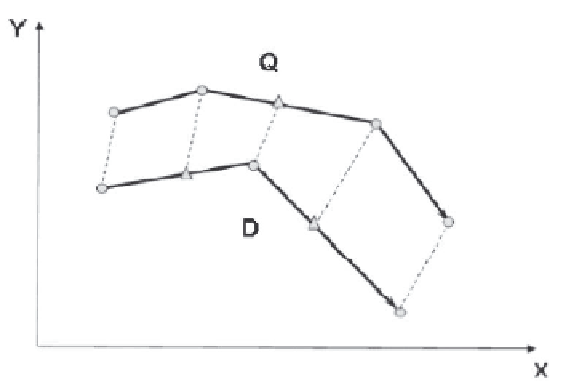
Fig. 9.4.
The alignment task between two trajectories.
inserted corresponding points located on Q and D, respectively. The set of
points Q
′
and D
′
can be called check-points, each of which can be represented
by (x+,x−,y+,y−) in the spatial domain. In order to compare two arbitrary
trajectories, we define a metric as follows:
⎛
⎝
10
⎞
⎠
10
01
01
Dist
Q
′
,D
′
i,j
′
j
′
′
j
′
=
(Q
−Q
i
)−(D
−D
i
)
•
,
(9.10)
where i and j (i<j) denote the i-th and j-th check points of two partial
trajectories of Q
′
and D
′
, respectively; Q
′
j
−Q
′
i
and D
′
j
−D
′
i
represent the
difference between the i-th and j-th check points of Q
′
and D
′
, respectively;
and (Q
′
j
−Q
′
i
)−(D
′
−D
′
i
)isa14 vector, and its subsequent term in Eq. (9.10)
is a 42 matrix. Before executing the matrix operation, the absolute value
of each element of (Q
j
′
j
′
′
j
′
i
) must be taken. The operation on
the right-hand side of Eq. (9.10) will result in a 12 vector. In addition,
−Q
i
)−(D
−D
Dist
Q
′
,D
′
i,j
is basically an estimation of the distance between two partial
trajectories on Q
′
′
, respectively. With the above distance metric, we
can define the total distance between Q and D as follows:
and D
N−1
Dist
Q
′
,D
′
i,i+1
TDist(Q, D)=
.
(9.11)
i=1
The norm defined in Eq. (9.11) is an l2-norm.
The advantage of the proposed representation scheme is that we do not
really need to compare the check points pair by pair. It should be noted,