Biomedical Engineering Reference
In-Depth Information
(a)
(b)
(c)
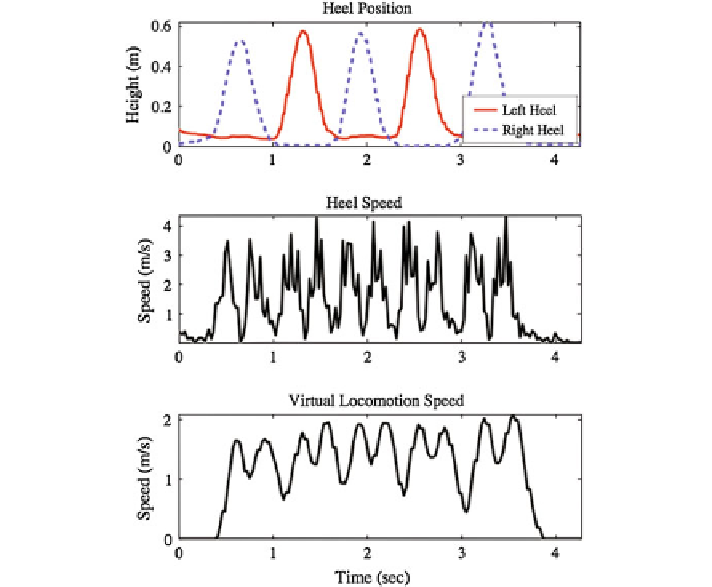
Fig. 11.4
LLCM-WIP system overview.
a
Vertical position of the user's heels;
b
Heel speed
obtained through differentiation;
c
Virtual locomotion speed. (Reproduced from Feasel et al. [
9
])
a latency of one step. The GUD-WIP algorithm consciously traded longer stopping
latency (
∼
500ms) for smoother inter-step motion.
While Yan et al. used a linear relationship between step frequency and speed, the
biomechanics literature reports a quadratic relationship between these two values.
Wendt used the formula reported by Dean [
7
] to compute virtual speed six times per
2-step cycle [
41
]. Figure
11.6
shows Dean's equation, a graph of its curve, and step-
frequency to speed data points from other published works. The formula is partially
customized with user height, (h).
Figure
11.7
shows LLCM-WIP and GUD-WIP speed profiles computed from the
tracker log of the same five-step sequence from the rhythmic phase of a start-to-stop
walking event. Note that unlike LLCM-WIP, GUD-WIP speed (and hence optic flow)
does not approach zero during double support; however, there are discontinuities
when speed is updated (3 times/step). We do not yet know if these discontinuities
have perceptual or task-performance consequences.