Biomedical Engineering Reference
In-Depth Information
(a)
(b)
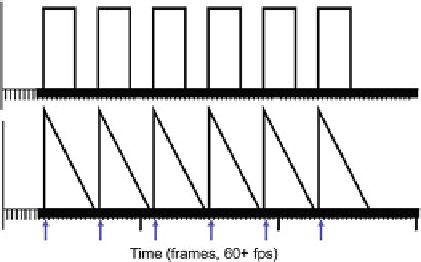
Fig. 11.3
Exaggerated examples of foot-strike driven speed profiles. Time is measured in frames;
small arrows below the X-axis indicate foot-strikes every 400ms (
∼
.
6mph).
a
User's viewpoint is
moved a set distance for each foot-strike and that distance is added uniformly over several frames.
b
To avoid pauses in the optic flow while speed is zero, the set distance is added non-uniformly over
several frames. The saw-tooth shape minimizes latency at the start of motion for each step. (After
a figure in Feasel et al. [
9
])
3
11.2.1.3 Techniques to Smooth Speed Between Foot Strikes
Low-Latency Continuous Motion WIP (LLCM-WIP)
. LLCM-WIP was devel-
oped to reduce starting and stopping latency and to smooth speed during rhythmic-
phase walking [
9
]. LLCM-WIP uses trackers placed just below the user's knees.
From the tracker data it finds the location of the user's heel via a rigid body trans-
form and calculates the speed of the user's heel in the vertical axis from that data.
LLCM-WIP supports maneuvering by requiring that a heel-speed threshold be ex-
ceeded before a full step forward is taken. After some signal processing, vertical heel
speeds above the threshold are mapped to locomotion speed. The locomotion speed
signal is noisy and dips close to zero during the double support phases of gait. At
the cost of approximately 100ms of latency, filtering smoothes the output speed and
reduces, but does not eliminate, those speed dips (Fig.
11.4
). Because virtual speed is
mapped continuously from heel speed, speed can be changed at any time by speeding
or slowing stepping movements.
Gait-Understanding-Driven WIP (GUD-WIP)
. GUD-WIP addresses the problem
of speed variation during rhythmic walking with a technique that updates speed six
times during each two-step WIP gait cycle using a quadratic function reported in
the biomechanics literature that relates stepping-frequency and speed. Figure
11.5
shows the GUD-WIP system in use.
The timing of events in the WIP gait cycle (Fig.
11.2
) is discoverable from time-
stamped logs of tracking data from the user's shins. The events occur when tracker
position starts changing (foot off), stops changing (foot strike), changes direction
(reaching maximum step height). Stepping frequency is computed from the time
stamps of the three most recent WIP-cycle events. After startup, step frequency can
be (re)computed six times in each two-step cycle. Startup requires three gait events,