Graphics Reference
In-Depth Information
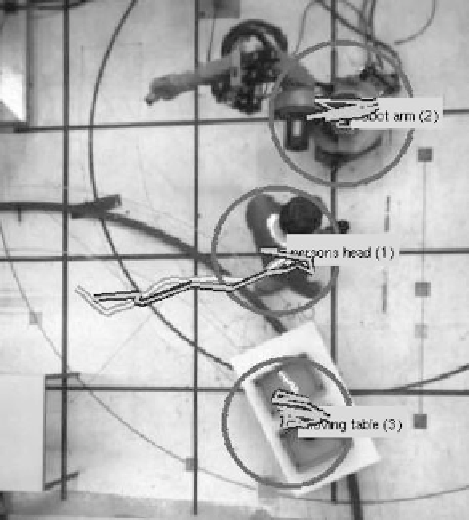
Fig. 7.2
Trajectories of
tracked objects (
dark grey
)
with annotated ground truth
(
light grey
) for a typical
industrial scene
in Sect.
7.2
regarding the industrial production environment). Furthermore, to pre-
cisely predict possible collisions between the human and the robot while they are
working close to each other, it is necessary to detect parts of the human body, espe-
cially the arms and hands of a person working next to the robot, and to determine
their three-dimensional trajectories in order to predict collisions with the robot. Sec-
tion
7.1.2
gives an overview of existing methods in the field of vision-based gesture
recognition. These approaches are certainly useful for the purpose of human-robot
interaction, but since many of them are based on two-dimensional image analy-
sis and require an essentially uniform background, they are largely insufficient for
safety systems. In contrast, the three-dimensional approaches introduced by Hahn
et al. (
2007
,
2010a
) and by Barrois and Wöhler (
2008
) outlined in Sects.
2.2.1.2
and
2.3
yield reasonably accurate results for the pose of the hand-forearm limb
independent of the individual person, even in the presence of a fairly cluttered back-
ground (cf. Sects.
7.3
and
7.4
).
7.1.2 Pose Estimation of Articulated Objects in the Context
of Human-Robot Interaction
Gesture recognition is strongly related to the pose estimation of articulated objects.
An overview of important methods in this field is given in Sect.
2.2.1.2
. Three-
dimensional pose estimation results obtained for the human body or parts of it are
Search WWH ::

Custom Search