Graphics Reference
In-Depth Information
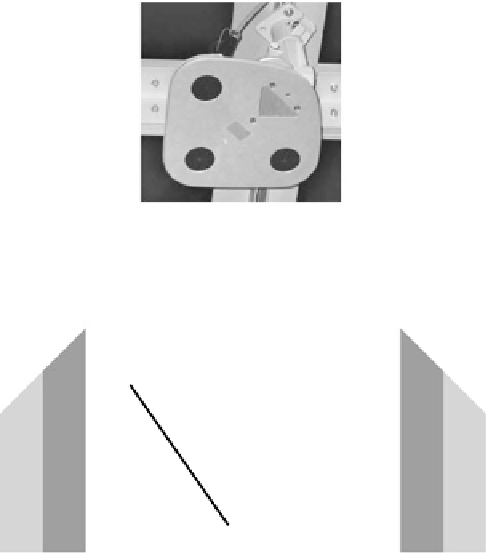
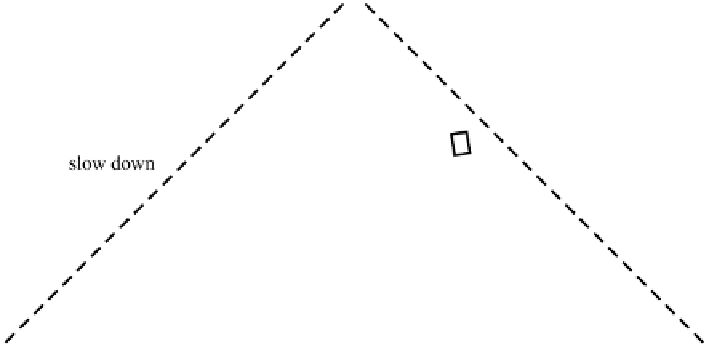
Fig. 7.1
The SafetyEYE system. The trinocular camera sensor (
top
) observes the scene. Once a
person or an object enters the virtual protection areas, the robot slows down (
light grey areas
)or
stops (
dark grey areas
)
as metal fences, light barriers, and laser scanners often takes as long as one day,
while the three-dimensional protection areas of the SafetyEYE system are usually
configured within a few hours. A typical industrial scene is shown in Fig.
7.2
.The
system is designed to comply with safety requirements according to the regulations
EN 954-1 and SIL 2 EN 62061.
In its first version, the SafetyEYE system aims at preventing hazardous interfer-
ences between humans and robots. Hence, although it is more flexible than typical
modern safety systems usually consisting of different components, its behaviour is
still similar to traditional systems in that its main task is to strictly separate the
human from the machine, slowing down and eventually stopping the machine if a
human enters the protection area. The capabilities of future systems might be ex-
tended beyond the generation of a three-dimensional point cloud to a distinction
between persons and objects. This would be a step towards collaborative working
environments in which persons and machines are able to work simultaneously on
the same workpiece.
For such complex scenarios, it is necessary to perform a segmentation of the
three-dimensional point cloud and a detection of objects in it, as is achieved by the
method introduced by Schmidt et al. (
2007
) outlined in Sect.
2.3
(cf. the evaluation



















Search WWH ::

Custom Search