Graphics Reference
In-Depth Information
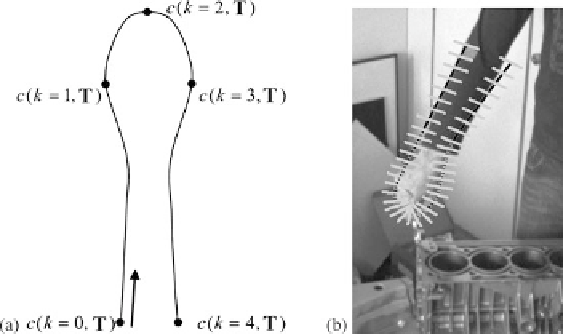
Fig. 2.8
(
a
) The two-dimensional model curve described by the curve function
c(k,
T
)
. The pa-
rameter
k
defines a point on the curve, and the vector
T
contains the curve parameters. (
b
)Curve
function
c(k,
T
)
with the
k
perpendiculars centred at the curve points
The CCD algorithm fits a parametric curve
c(k,
T
)
to the image
I
∗
. The pa-
rameter
k
∈[
of the parametric model curve
c(k,
T
)
showninFig.
2.8
ais
incremented with the points defining the curve, and the vector
T
denotes the set of
estimated curve parameters. The CCD algorithm relies on the image
I
∗
0
,K
]
and the ini-
m
T
, Σ
T
)
of the parameters
T
of the curve
model, which is assumed to be Gaussian and is thus given by the mean parameter
vector
tial probability distribution
p(
T
)
≈
p(
T
|
m
T
and the corresponding covariance matrix
Σ
T
. As initial values, the a pri-
ori density parameters
(
m
T
, Σ
T
)
are used. The CCD algorithm adapts the model
to the image by repeatedly performing steps 1 and 2 described below until the re-
duction of
m
T
and
Σ
T
becomes smaller than a predefined value or after a given
maximum number of iteration cycles has been performed. This procedure can be
summarised by the two steps.
Step 1: Learning Local Probability Distributions
The local probability distri-
butions
S(
m
T
,Σ
T
)
, which are given by the pixel grey value means and standard
deviations, are computed on both sides of the curve.
In this step pixels close to the curve (along the perpendiculars as shown in
Fig.
2.8
b) are probabilistically assigned to the inner and the outer side of the ex-
pected curve. Then the probability distributions
S(
m
T
,Σ
T
)
of the pixel grey values
on both sides of the curve are computed. For this porpose only pixels on
(K
1
)
different lines segments are used. Each line segment
k
is a perpendicular on the
curve point
C
k
=
c(k,
m
T
)
of the expected curve. In contrast to the original real-
time CCD algorithm (Hanek,
2001
), the perpendiculars are not chosen to be equally
spaced along the curve, because our applied curve model is not a closed curve. Thus
there are more perpendiculars on the closed side (hand part) of our curve, to obtain
a stronger dependence of the objective function on the shift along the forearm axis
+
Search WWH ::

Custom Search