Graphics Programs Reference
In-Depth Information
6.6 Kinematiksimulation eines Mechanismus im
Assembly Design
Mechanismen besitzen im Unterschied zu starren technischen Gebilden noch Freiheitsgrade fr
ihre Bewegung. In der Baugruppenkonstruktion von CATIA ist es mglich, Bewegungen von
Mechanismen in begrenztem Mae zu simulieren. Dies geschieht mit der Funktion
Manipulation
unter Bezug auf die gesetzten Bedingungen.
Die Anwendung der Funktion soll an einem konkreten Beispiel, n¦mlich der in den vorherge-
henden Kapiteln modellierten Spannvorrichtung gezeigt werden. Innerhalb dieser Baugruppe
ist die Unterbaugruppe
UBG-Spannmechanismus
kein starres technisches Gebilde sondern ein
beweglicher Mechanismus.
Die Unterbaugruppe Spannmechanismus
muss geladen sein. Die Funktion
Manipula-
tion
aufrufen.
Ausgangsstellung des Mechanismus
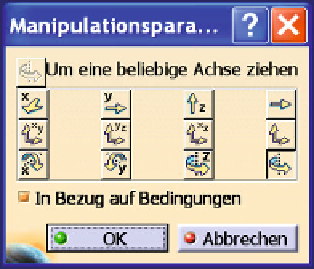
Wird der Schalter
In
Bezug auf Bedingun-
gen
aktiviert,
so
werden alle zwischen den
Bauteilen gesetzten Bedingungen bei der Be-
wegung des Mechanismus bercksichtigt.
Man w¦hlt im Fenster die Funktion
Um eine
beliebige Achse ziehen
und als Drehach-
se eine Bohrungsachse. Dann (ganz langsam!)
den Spannhebel (linke Maustaste gedrckt
halten) bewegen. Jetzt bewegt sich der Me-
chanismus gem¦ seiner Bedingungen.
Achtung, das Wiederherstellen der ursprngli-
chen Position des Mechanismus ber die
Schaltfl¦che
Abbrechen
dauert etwas l¦nger
,
deshalb lieber die Simulation mit
OK
beenden.
Kinematiksimulation des Mechanismus
Hinweise:
Bewegt sich die gesamte Baugruppe im Raum, so wurde kein Teil fixiert (Manah-
me: MG-Gestell fixieren).
Bewegt sich der Mechanismus gar nicht, wurden falsche oder zu viele Bedingungen definiert,
z. B. eine Winkelbedingung zwischen den Hebelteilen und der Distanzplatte (Manahme: Be-
dingung inaktivieren).