Graphics Programs Reference
In-Depth Information
Stoppen der Bewegungssimulation bei Kollision
Wird zus¦tzlich die Funktion
Manipulation bei Kollision stoppen
aus der gleichen
Funktionsgruppe aktiviert, so wird die Simulation der Bewegung beendet, wenn ein Teil des
bewegten Mechanismus mit einem anderen Bauteil kollidiert.
Bewegung des Spannmechanismus im Einbau in der Oberbaugruppe
Besonders attraktiv ist eine Simulation eines Mechanismus innerhalb seiner Einbauumgebung.
Lassen sich doch dann die Bewegungsverh¦ltnisse besser bewerten und auch Kollisionen und
Kontakte mit benachbarten Bauelementen feststellen.
Die Funktion
Manipulation
soll jetzt auf den gesamten Spannmechanismus der Vorrichtung
angewendet werden. Dazu mssen alle vorl¦ufig oder unbewusst gesetzten Baugruppenbedin-
gungen zwischen der
MG-Druckgelenk
und der
MG-Aufnahmebolzen
sowie dem Werkstck
entfernt oder inaktiviert werden (falls noch nicht geschehen), da sonst eine Bewegung nicht
mglich ist! Diese Aufgabe ist deshalb etwas schwieriger.
Sind Unterbaugruppen in eine bergeordnete Baugruppe eingebaut, so werden sie dort als starre
Gebilde behandelt. Bevor eine Kinematiksimulation stattfinden kann, muss der Mechanismus mit
der Funktion
Flexible/starre Unterbaugruppe
zur flexiblen Unterbaugruppe erkl¦rt
werden. Das rechte Symbol stellt den dadurch ver¦nderten
Strukturknoten dar.
Die Oberbaugruppe
Spannvorrichtung
laden.
Die Unterbaugruppe
Spannmechanismus
mit der Funktion
Flexible/starre Unterbaugruppe
zum Mechanismus erkl¦ren.
Die Lage einer Lasche auf dem Spannhebel und Lage der
MG-Druckgelenk
zur Unterkante
des Spannhebels festlegen (Vorschlag: durch je eine geeignete Offset-Bedingung). Sonst
verschieben sich diese Komponenten bei der folgenden Manipulation!
Die Oberbaugruppe aktivieren.
Die Funktion
Manipulation
aufrufen. Im Fenster den Schaltknopf
In Bezug auf Bedingun-
gen
aktivieren und die Bewegungsmanipulation in schon bekannter Weise ausfhren.
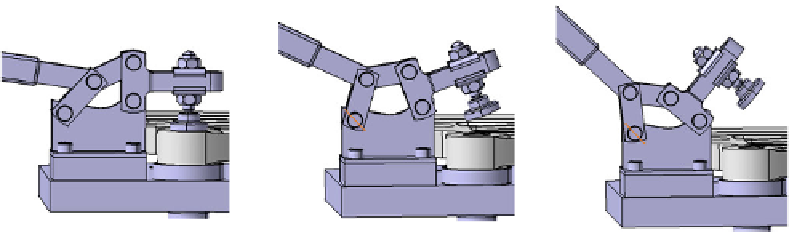
Die Bilder zeigen die Bewegungsverh¦ltnisse des Spannmechanismus. Die groe ᅱffnungs-
weite gestattet ein problemloses Einlegen und Entnehmen des Werkstcks.
In der Realit¦t wird der Spannmechanismus so justiert, dass sich die Hebel beim Spannen
durch ihre Totlage bewegen, bis der Bet¦tigungshebel an der Kante des T-Stcks rttelsicher
anliegt. Die Hebel verformen sich dabei elastisch. Eine Simulation der Bewegung durch die
Totlage ist im
Assembly Design
nicht mglich.