Digital Signal Processing Reference
In-Depth Information
Im(
s
)
s
Re(
s
)
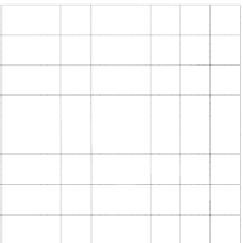
Bild 12-6
Pol-Nullstellendiagramm des Butterworth-Tiefpassfilters nach Tabelle 12-3
A12.5
Geben Sie die Übertragungsfunktion des in A12.3 und 4 entworfenen analogen
Butterworth-Tiefpassfilters mit
H
BWTP
(0) = 1 an.
Hinweis:
Verwenden Sie dabei die normierte komplexe Frequenz.
H
s
BWTP
12.2.5
Bilineare Transformation
Für die zeitdiskrete Nachbildung des analogen BWTP stehen im Wesentlichen zwei Methoden
zur Verfügung:
Bei der
impulsinvarianten
und der
sprunginvarianten Transformation
ist die zeitdiskrete
Impuls- bzw. Sprungantwort gleich der entsprechend abgetasteten zeitkontinuierlichen Sys-
temfunktion. Je nachdem, wie groß das Abtastintervall gewählt wird, können
Aliasing-
Fehler
den Frequenzgang erheblich verfälschen, sodass das im Frequenzbereich vorgege-
bene Toleranzschema verletzt wird. Die impulsinvariante bzw. sprunginvariante Transfor-
mation wird vor allem dann eingesetzt, wenn zeitkontinuierliche Vorgänge simuliert wer-
den sollen.
Anmerkung:
Die impulsinvariante bzw. sprunginvariante Transformation wird im Versuch nicht
weiter betrachtet. MATLAB unterstützt die impulsinvariante Transformation mit der Funktion
impinvar
.
Die
bilineare Transformation
wird in der Regel verwendet, wenn dem Entwurf ein Tole-
ranzschema im Frequenzbereich zugrunde liegt. Sie wird direkt im Bildbereich durch-
geführt und transformiert die Pole und Nullstellen des zeitkontinuierlichen Filters aus der
s
-
Ebene in die Pole und Nullstellen des zeitdiskreten Filters in der
z
-Ebene. Aliasing-Fehler
werden dadurch vermieden. Im Frequenzgang tritt jedoch die
Arcustangens-Verzerrung
auf.
Die Idee und die Wirkungsweise der bilinearen Transformation sind in Bild 12-7 zusammenge-
stellt. Der Vergleich der Systembeschreibungen in der
s
-Ebene und der
z
-Ebene zeigt die Ge-
meinsamkeiten auf. Analoge Filter sind stabil, wenn die Pole in der linken
s
-Halbebene liegen.
Bei realisierbaren (kausalen) digitalen Filtern müssen die Pole im Inneren des Einheitskreises
der
z
-Ebene liegen. Den Frequenzgang analoger Filter findet man auf der imaginären Achse
während der Frequenzgang digitaler Filter auf dem Einheitskreis definiert ist.