Graphics Reference
In-Depth Information
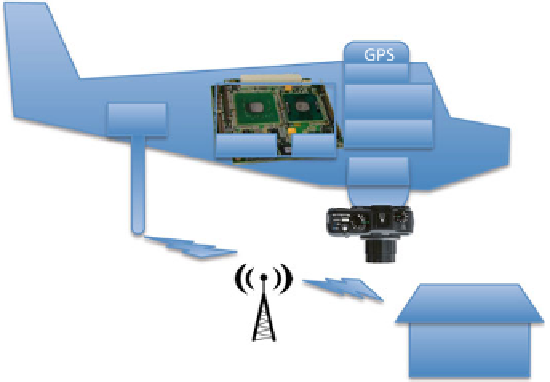
Fig. 9.2
Overview of the aircraft systems and the multihop communication link to the ground
control station (GCS)
9.3 Object Detection
Key to the success of the embedded image analysis was the careful crafting to its oper-
ational objective that required a vehicle detector that was invariant to illumination,
background, motion, scale, and in-plane rotation, that was flexible with the types of
vehicles found, and that could analyze the images fast enough on the available hard-
ware. Feature-based methods (e.g., SIFT and SURF, [
4
,
5
]) are invariant to rotation,
but not general enough for detecting vehicles, and also not particularly fast. This
section briefly introduces the vision method used, then describes two approaches for
overcoming the method's inherent shortcomings and how the operational require-
ments were met (Figs.
9.2
and
9.3
).
9.3.1 Viola-Jones Style Detector
Cascaded detectors in the style of Viola and Jones [
6
] are fast, sufficiently generic, and
can be tuned for the desired recall or precision, but they are not rotation invariant.
Their proven performance with objects with rather uniform appearance [
7
]stems
from multiple processing stages, each composed of several weak classifiers, can
improve object discrimination while maintaining recall performance. The detectors
for these experiments were trained on human-annotated positive (near-nadir vehi-
cles) and negative images (no vehicles) that were previously collected Rascal UAV
imagery.