Graphics Reference
In-Depth Information
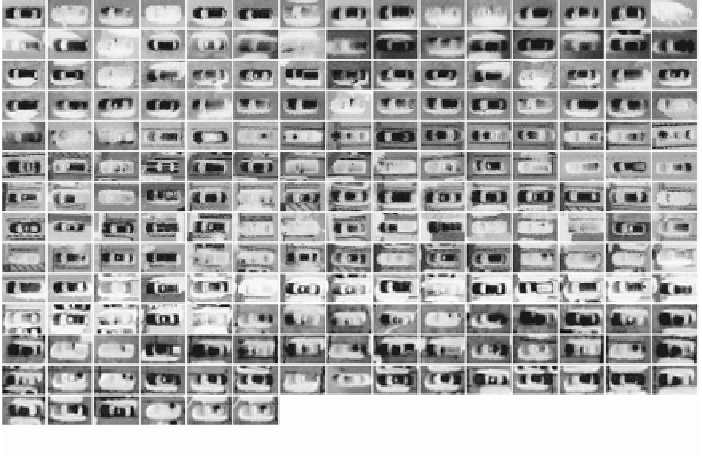
Fig. 9.3
Partial training set for OpenCV's Viola-Jones style training algorithm for the “aligned”
cascade
A common obstacle is rotational invariance, because the positive images are typi-
cally aligned in the same direction to allow for the most representative features to be
extracted by the training software. For this detector this means that all cars would be
facing the same direction. Vehicles appearing in the near-nadir aspect, as they will
be in the images obtained by the UAV, can be in any orientation in the image plane.
Two methods of overcoming this obstacle were examined, the faster of the two was
used for the ground station and onboard processing experiments.
9.3.2 Rotation Invariance Through Image Rotation
The first method trains a detector on vehicles in one orientation and detects rotated
vehicles by repeatedly rotating the image before applying the detector. For the
machine learning to focus on similarities, the training set was resized with the same
margin by percentage of the detection's dimensions for all positive training images.
The training set was aligned with all vehicles facing left to standardize all images.
With the aligned training detector the vehicles need to be facing the same direction.
To achieve rotational invariance during detection time, all test images had to be rotated
within the functional tolerance of the trained detector before the detector is applied
to search for vehicles. This real-time process incurs additional processing time.