Environmental Engineering Reference
In-Depth Information
12
10
8
6
0
100
200
300
400
500
600
1250
1200
1150
1100
1050
1000
0
100
200
300
400
500
600
5
4
3
2
1
0
0
100
200
300
400
500
600
6
5
4
3
0
100
200
300
400
500
600
50
40
30
20
0
100
200
300
400
500
600
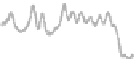
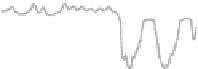
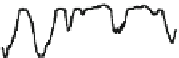
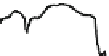
Time (s)
Fig. 4.17 System response to a realistic wind profile. Gray lines PI controller, black lines H
?
controller
operating locus. In addition, a classical anti-windup compensation was added to
improve the transient between regions 1 and 3. The PI tuning constants are
K
P
ð
b
¼
0
Þ¼
0
:
01882681 s, K
I
ð
b
¼
0
Þ¼
0
:
008068634. The function that makes
the gain scheduling is f
ð
b
Þ¼
1
=ð
1
þ
b
=
b
k
Þ
, where b is the pitch angle and b
k
¼
6
:
30236 is the blade pitch angle when the rotor power has doubled. The generator
torque control is the same as in the H
1
approach.