Environmental Engineering Reference
In-Depth Information
15
10
5
0
10
20
30
40
50
60
1400
1300
1200
1100
1000
900
0
10
20
30
40
50
60
20
15
10
5
0
0
10
20
30
40
50
60
7
6
5
4
3
2
0
10
20
30
40
50
60
60
50
40
30
20
0
10
20
30
40
50
60
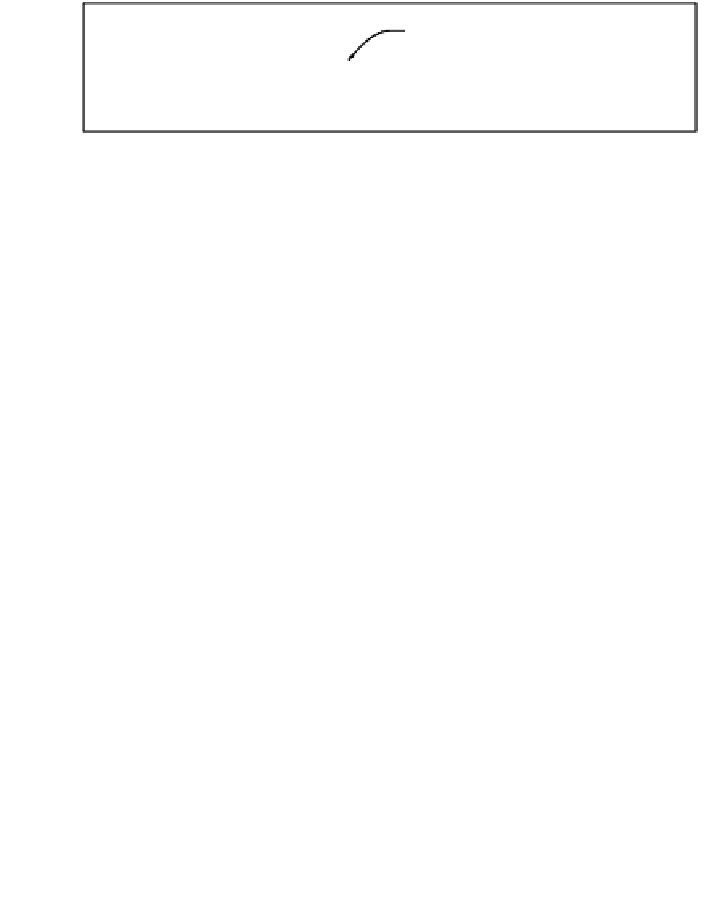
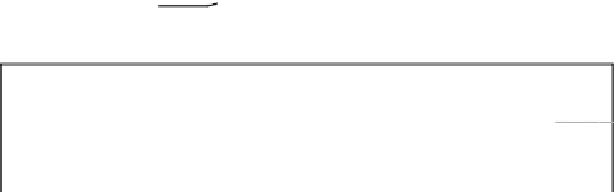
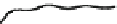
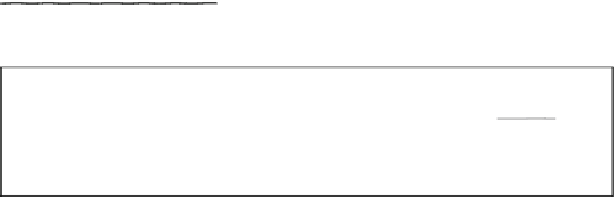
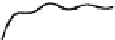
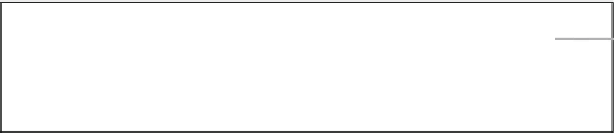
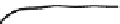
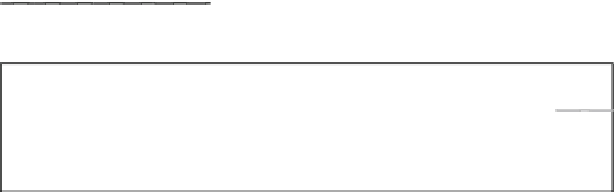
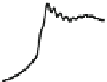
Time (s)
Fig. 4.16 System response to a wind rise profile. Gray lines PI controller, black lines H
?
controller
controller, was designed following the guidelines in [
6
,
17
]. Basically, the PI
controller was tuned as in [
6
] after linearizing the wind turbine model at the
operating point
ð
V
;
b
;
X
r
Þ¼ð
11
:
4 m/s
;
0
;
12
:
1 rpm
Þ
. The controller gains were
calculated to achieve appropriate damping (0.7) and natural frequency (0.6 rad/s)
[
17
]. As the controller ensures the desired behavior only at the design operating
point, a pitch-dependent gain is applied to compensate for the nonlinear rotor
torque. This gain is a function of b obtained by fitting the values of k
b
along the