Information Technology Reference
In-Depth Information
O
.x;t/
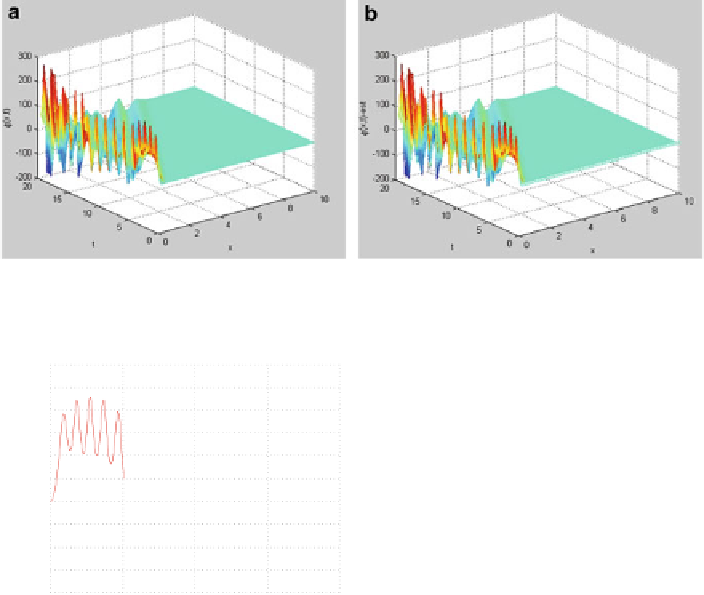
Fig. 6.7
Test case 2: (
a
) spatiotemporal variation of the wave function .x;t/(
b
) estimate
of the wave function provided by the derivative-free nonlinear Kalman Filter
a
b
300
150
250
100
200
50
150
100
0
50
−50
0
−50
−100
−100
−150
−150
−200
−200
0
5
10
15
20
0
5
10
15
20
t
t
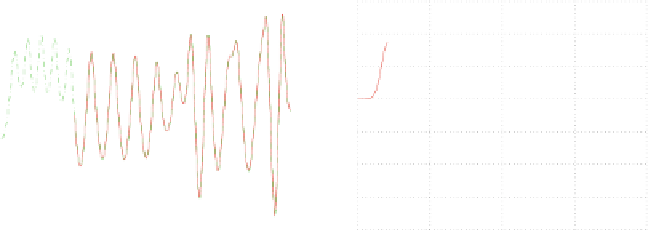
Fig. 6.8
Test case 2: estimate (
dashed green line
) and real value (
red continuous line
)(
a
)of
.x
1
;t/at grid point 1 (
b
)of.x
2
;t/at grid point 2
a
b
80
60
60
40
40
20
20
0
0
−20
−20
−40
−40
−60
−60
0
5
10
15
20
0
5
10
15
20
t
t
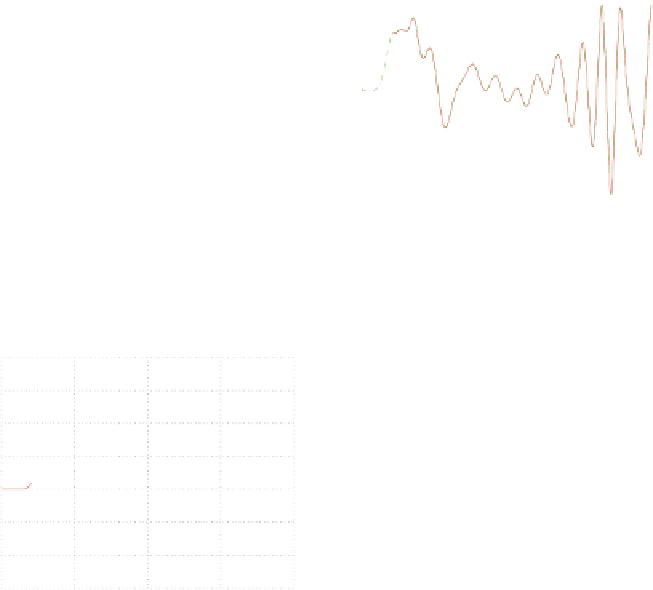
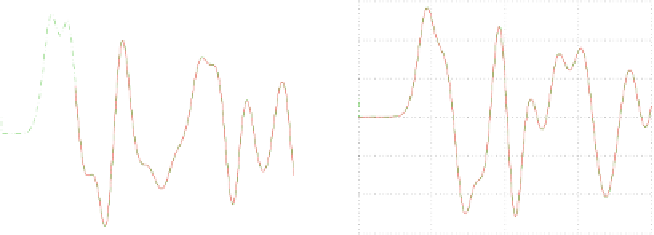
Fig. 6.9
Test case 2: estimate (
dashed green line
) and real value (
red continuous line
)(
a
)of
.x
5
;t/at grid point 5 (
b
)of.x
7
;t/at grid point 7