Information Technology Reference
In-Depth Information
(a)
(b)
(c)
image trajectories
0.02
0.02
0.02
0.01
0.01
0.01
0
0
0
−0.01
−0.01
−0.01
−0.02
−0.02
−0.02
−0.03
−0.03
−0.03
−0.04
−0.04
−0.04
−0.05
−0.05
−0.05
200
400
600
800
1000
1200
1400
100
200
300
400
500
600
700
800
900
1000
100
200
300
400
500
600
700
translational velocities in
m
/
s
2
2
2
0
0
0
−2
−2
−2
−4
−4
−4
−6
−6
−6
−8
−8
−8
−10
−10
−10
−12
−12
−12
200
400
600
800
1000
1200
1400
100
200
300
400
500
600
700
800
900
1000
100
200
300
400
500
600
700
rotational velocities in
deg
/
s
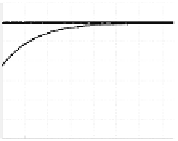
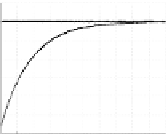
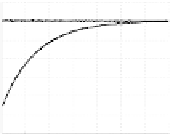
Fig. 16.8
A comparison between the hybrid visual servoing schemes under a pure rotational
displacement: (a) control scheme in Section 16.3.3.2; (b) control scheme in Section 16.3.3.3;
and (c) control scheme in Section 16.3.3.4
16.5
Conclusion
In this chapter, it has been shown how a generic projection model can be exploited
to design vision-based control laws valid for all cameras obeying the unique view-
point constraint. First, the problem of estimating homographic relationship between
two spherical views related to a reference plane has been addressed. Then, three
homography-based control schemes have been presented. The task functions are de-
fined to allow as much as possible nice decoupling properties of the control laws.
In all cases, the rotational control is achieved using the orientation error extracted
from the estimated homography matrix. In the first control scheme, the visual fea-
tures used to control the translational motions are chosen as the combination of the
2D coordinates of an image point and the ratio of the norms of the corresponding
3D point at the current and desired configurations (which can be computed from the
homography matrix). In a second control scheme, a scaled 3D point, computed from
the corresponding image point and the homography matrix, is exploited to control
efficiently the translations. It allows to obtain properties similar to 3D point-based
visual servoing while being model free. The last control law allows to fully decou-
ple translational and rotational motions (the interaction matrix is block-diagonal)
by employing three ratios of the norms related to three 3D points. From a practical





















































































Search WWH ::

Custom Search