Information Technology Reference
In-Depth Information
(a)
(b)
4
0.08
2
0.06
0
0.04
−2
0.02
−4
0
−6
−0.02
−8
−0.04
−0.06
−10
200
400
600
800
1000
1200
1400
200
400
600
800
1000
1200
1400
(c)
(d)
0.2
0.15
0.1
0.05
0
−0.05
200
400
600
800
1000
1200
1400
(e)
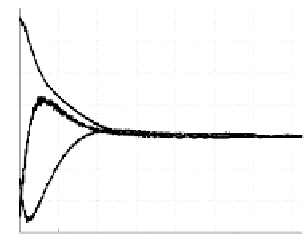
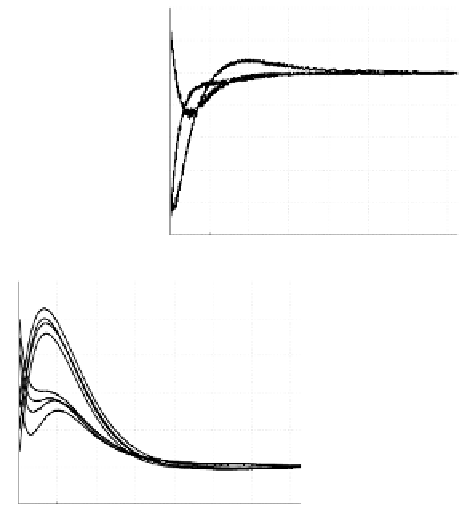
Fig. 16.3 A
, 2D points-based visual servoing: (a) initial image; (b) desired image and image-
points trajectories; (c) translational velocities in
m
/
s
; (d) rotational velocities in
deg
/
s
;and
(e) error vector components
fails, the robot reaching quickly its joint limits. The rotation about the
Z
-axis is thus
reduced to 40 deg for the control
A
.
Figure 16.3 shows the results obtained using the control
A
. The interaction ma-
trix depends on 3D parameters, points coordinates and calibration parameters. If one
supposes that the camera-robot system is correctly calibrated and that the measure-
ments are noiseless, the 3D parameters should be accurately estimated to guarantee
a quasi-exponential decreasing of the task function
e
(leading to straight line tra-
jectories of the points in the image plane). In this experiment, the 3D parameters












































Search WWH ::

Custom Search