Image Processing Reference
In-Depth Information
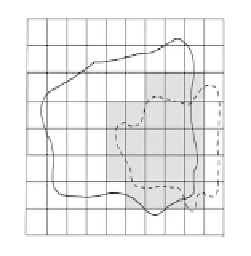
(4.3a) Two overlapped sets with
tolerance relation
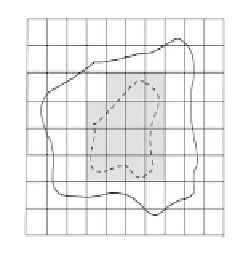
(4.3b) Two disjoint set with tol-
erance relation
(4.3c) Inclusion and tolerance
relation
FIGURE 4.3: Tolerance relation between sets; Space X is partitioned into squares, Sets
A(solid line), set Y dashed lines have tolerance relation. A∩Y are colored in gray
The relation
∼
=
X,ϕ,ε
is a special case of the tolerance near set relation
∼
=
B,ε
(Peters, 2009)
(see, also, the weak nearness relation in (Peters and Wasilewski, 2009)). For conciseness,
∼
=
is used to denote
∼
=
X,ϕ,ε
. In a manner similar to what L. Polkowski has done in defining the
equivalence class of a rough set A⊂X, we introduce the following equation as a tolerance
class for a rough subset of the universe, A⊂X, with A 6= A:
A
/
∼
={Y⊆U|A∩Y 6= φ}.
(4.22)
=
In other words we are suggesting that two rough sets of universe A, Y⊂X have tolerance
relation(
∼
=
) with each other iff A∩Y 6= φ. Notice that equation 4.21 is defined on elements
in a set X. By contrast, equation 4.22 is defined for two sets.
Proposition 4.4.1
∼
= is a tolerance relation.
Proof. To show
∼
= is a tolerance relation, we have to show that it is reflexive and symmetric:
•if A = Y⇒A = Y therefore A∩Y 6= φ; So A
∼
=
Y . This means that
∼
=
is a
reflexive relation, A
∼
=
A.
•if A
∼
= Y⇒A∩Y 6= φ⇒Y∩A 6= φ⇒Y
∼
= Y ; therefore
∼
= is a symmetric
relation.
€
Proposition 4.4.2 Equation4.20 is the specialization of equation 4.22.
Proof. We have to show that the equivalence class of a set A is a special case of its toler-
ance class. In other words, an equivalence class A
/∼
is included in A
/
∼
. Let Y⊂X and
=
. Since Y∈A
/∼
, we have A = Y and A = Y .
We only need the first part; by A = Y we get A∩Y = A 6= φ. Therefore A
/∼
is included
in A
/
∼
Y∈A
/∼
, we have to show that Y∈A
/
∼
=
.
€
=
Figure 4.3 are showing three different sets that have tolerance relation with set A⊂X. In
figure 4.3b the set Y⊂X is disjoint from the set A with A∩Y = φ, but has a tolerance
relation with A because A∩Y 6= φ.










Search WWH ::

Custom Search