Information Technology Reference
In-Depth Information
2.6.4.3 What to Do in Practice?
We summarize here the model selection procedure that has been discussed.
For a given complexity (for neural networks, models with a given number
of hidden neurons),
•
Perform trainings, with all available data, with different parameter initial-
izations.
•
Compute the rank of the Jacobian matrix of the models thus generated,
and discard the models whose Jacobian matrix does not have full rank.
•
For each surviving model, compute its virtual leave-one-out score and its
parameter
µ
.
For models of increasing complexity: when the leave-one-out scores become
too large or the parameters
µ
too small, terminate the procedure and select
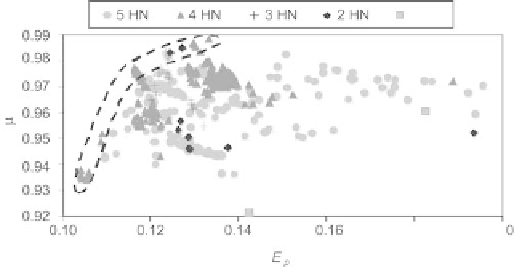
the model. It is convenient to represent each candidate model in the
E
p
− µ
plane, as shown, for the previous example, on Fig. 2.29. The model should be
selected within the outlined area; the choice within that area depends on the
designer's strategy:
•
If the training set cannot be expanded, the model with the largest
µ
should
be selected among the models that have the smallest
E
p
.
•
If the training set can be expanded through further measurements, then
one should select a slightly overfitted model, and perform further experi-
ments in the areas where examples have large leverages (or large confidence
intervals); in that case, select the model with the smallest virtual leave-
one-out score
E
p
, even though it may not have the largest
µ
.
2.6.4.4 Experimental Planning
After designing a model along the guidelines described in the previous sec-
tions, it may be necessary to expand the database from which the model was
Fig. 2.29.
Assessment of the quality of a model in the E
p
− µ
. plane
Search WWH ::

Custom Search