Environmental Engineering Reference
In-Depth Information
0.1
150
i
L
i
N
0.05
75
0
0
−0.05
−75
−0.1
−150
0
0.02
0.04
0.06
0.08
0.1
0
0.02
0.04
0.06
0.08
0.1
Time [s]
Time [s]
(a)
V
(b)
and
100
0.5
50
0.25
0
0
−50
−0.25
−100
−0.5
0
0.02
0.04
0.06
0.08
0.1
0
0.02
0.04
0.06
0.08
0.1
Time [s]
Time [s]
(c) filtered
(d) filtered
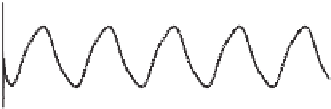
Figure 12.8
Simulation results when the neutral current is about 68 A peak at 50 Hz
1
−
e
−
sh
sh
10
−
4
s,
which is a notch filter with the notching frequencies at the multiples of the switching frequency
f
s
=
The signals
u
N
and
i
c
shown were filtered by the hold filter
H
(
s
)
=
with
h
=
10 kHz, so that the effect of the ripples at the switching frequency was eliminated. The
peak value of
V
a
v
e
is less than 0
1 V; the inductor current is almost the same as the neutral
current and the current
i
c
is very small. The neutral leg provides a voltage
u
N
of about 60 V
peak. The neutral point is balanced with respect to the DC terminals in spite of a varying DC
source and a large neutral current. Note that the filtered voltage is quite different from the one
shown in Figure 11.10 because of the different values of
L
.
.
12.6 Summary
Based on (Zhong
et al.
, 2002a, 2006), a linear model for the independently-controlled neutral
leg that consists of a conventional neutral leg and a split DC link is developed at first. The
conventional neutral leg provides a path for the neutral current and charges/discharges the
capacitors to maintain the neutral point while the capacitors provide a way to independently
control the conventional neutral leg. Hence, the role of the split DC capacitors has been
changed from maintaining the neutral point to controlling the neutral point. Actually, as can be
seen from the model, only one capacitor is necessary. This results in an asymmetric topology
but does not change the control design. After introducing an artificial measurement noise
signal
n
and selecting appropriate weighting functions, the control problem of the neutral leg
is formulated as a standard
H
∞
control problem and a controller is derived.















































Search WWH ::

Custom Search