Environmental Engineering Reference
In-Depth Information
60
40
40
20
20
0
0
90
90
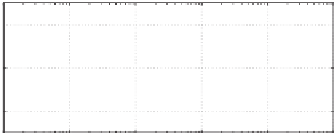
2400 rad/sec
2550 rad/sec
2700 rad/sec
45
0
0
−45
−90
−90
10
0
10
1
10
2
10
3
10
4
10
5
48
48.5
49
49.5
50
50.5
51
51.5
52
Frequency (Hz)
Frequency (rad/sec)
(a) whole frequency range (log scale)
(b) details around
50
Hz for different
cut-off frequencies (linear scale)
Figure 5.4
Bode plots of the discretised internal model
further degrading the controller performance. Alternatively, in order to maintain good tracking
performance of the controller, the cut-off frequency of the low-pass filter
ω
c
can be changed
according to the grid frequency variations. This adaptive mechanism is based on the formula
1
ω
c
=
−
τ
d
f
)
,
(5.5)
τ
d
(1
which is derived from (2.9). This is to make the poles of the internal model close to the
multiples of the fundamental frequency on the
j
ω
-axis. After several rounds of trial-and-error,
τ
d
has been chosen as 0
0196 s (98 out of 100 samples at 5 kHz). The frequency provided
by the PLL can be adopted to change
.
ω
c
of the low-pass filter in the internal model. When
the variations of the frequency are wide,
τ
d
might need to be changed. Figure 5.4(a) shows
the Bode plots of the discretised internal model
M
for different
ω
c
, with details around 50 Hz
shown in Figure 5.4(b).
5.2.3 Formulation of the Standard H
∞
Problem
In order to guarantee the stability of the system, the
H
∞
control problem, as shown in
l
(
P
Figure 5.5, is formulated to minimise the
H
∞
norm of the transfer function
T
z
w
=
F
,
C
)
from ˜
[
z
1
z
2
]
T
, after opening the local positive feedback loop of the
internal model and introducing weighting parameters
w
=
[
vw
]
T
to
z
=
ξ
and
μ
. The closed-loop system can be
represented as
z
y
P
˜
u
=
,
(5.6)
u
=
C y
,
where
P
is the generalised plant and
C
is the controller to be designed. The generalised plant
P
consists of the original plant
P
together with the low-pass filter
W
, the processing delay


























































Search WWH ::

Custom Search