Information Technology Reference
In-Depth Information
6
2
5
4
0
2
1
−5
0
−2
−10
0
−4
−15
−6
−1
−20
−8
50
55
60
65
70
75
50
55
60
65
70
75
50
55
60
65
70
75
Frame number
Frame number
Frame number
(a)
t
x
(b)
t
z
(c) θ
z
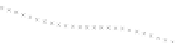
Fig. 6
Comparison of the ground-truthed motion and estimation using the gait-based and the
STK-based tracking approaches with (0.0,12.0) noise added: (a)
t
x
,(b)
t
z
,(c)θ
z
. “-" - ground
truth, “o" - STK-based estimates, and “
×
" - gait-based estimates.
Ta b l e 1
Ego-motion tracking statistics for different noise levels: where
m
s
and σ
s
are the
absolute mean and RMS errors by the STK tracker;
m
g
and σ
g
are the absolute mean and
RMS errors by the gait-based scheme. Units: displacements - arbitrary and angles - degrees.
Noise
t
x
t
z
θ
z
Va r
m
s
σ
s
m
g
σ
g
m
s
σ
s
m
g
σ
g
m
s
σ
s
m
g
σ
g
0
0.08 0.11 0.02 0.03 0.24 0.35 0.09 0.12 0.27 0.41 0.35 0.52
2
0.06 0.06 0.03 0.03 0.08 0.13 0.04 0.07 0.46 0.65 0.13 0.22
4
0.02 0.02 0.01 0.01 0.04 0.05 0.04 0.04 0.73 0.88 0.48 0.61
6
0.32 0.41 0.16 0.24 0.77 0.91 0.83 0.96 0.64 0.83 0.41 0.57
8
0.01 0.02 0.01 0.01 0.32 0.45 0.21 0.39 0.58 0.72 0.38 0.43
12
0.16 0.21 0.03 0.05 0.55 0.67 0.13 0.18 0.74 0.85 0.51 0.59
5.2
Synthetic Checked Target: Changing Sample Rates
The purpose of these experiments was to see if we could gain greater efficiency
of tracking by using the gait model to reduce the sampling rate, thus reducing the
computational load. Examining Table 2 and Fig. 7(a), sampling every third frame,
errors in the estimates of
t
z
using the gait model are reduced slightly in noise-free
data. However, when noise is added in Fig. 7(b), the gait model is necessary to retain
tracking as features are lost during tracking in the basic STK method. For example,
previous to frame 21, the estimates of
t
z
using the STK tracker are displaced above
the correct values because the fundamental matrix estimation is sensitive to errors
that occur in point correspondence. At frame 71, the step function is caused by
newly introduced incorrect correspondences that continue to propagate. Estimates
of rotation in Table 2 and Fig. 8 are more complicated. Although the gait-based
method again performs better than the STK-based technique, the differences are not
as marked as with the
t
z
and
t
x
parameters. They are almost comparable at a variance
of additive Gaussian noise of 12.0. Nevertheless, the absolute errors using gait are
less than 1.2 degrees on average. Taken overall the use of the gait model does im-
prove the accuracy of the recovered parameters and allows a reduced sampling rate
for the synthetic data. In practice, the gait model allowed recovery of transformation















































































































































Search WWH ::

Custom Search