Information Technology Reference
In-Depth Information
(a) 1st frame
(b) 50th frame
Fig. 4
Synthetic images with the feature points superimposed
2
2
1
1
0
0
−1
−1
−2
−2
0
10
20
30
40
50
0
10
20
30
40
50
Frame number
Frame number
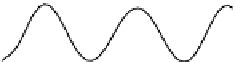
(a) Without additive noise
(b) With noise
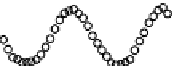
Fig. 5
Combination of translation and rotation (the arbitrary units are relative to unknown
parameters and hereafter). Estimating
t
x
in the sequence with random noise added using the
STK-based approach: (a) no additive noise, (b) (0.0,12.0) noise. “-" - ground truth, and “o" -
STK-based estimates.
is to compare results for tracking in phase 2 using the gait model against the bench-
mark STK algorithm from frame 51 onwards. The estimates of the translational (
t
x
and
t
z
) and rotational (
z
) components of motion with added noise of variance 12.0
are illustrated in Fig. 6. Table 1 provides error statistics for the accuracy of feature
location. The mean and standard deviation of the errors in all three estimated pa-
rameters are reduced in most cases when using the gait model, as is also apparent
from Fig. 6 since the gait data, marked with “
θ
" symbols, is closer to the ground
truth marked by the solid line. Hence, the data demonstrates quantitatively that the
gait-based technique recovers the motion parameters and locates the features more
accurately.
×


















































Search WWH ::

Custom Search