Hardware Reference
In-Depth Information
100
50
0
−50
−100
10
0
10
1
10
2
10
3
10
4
10
5
10
6
0
−50
−100
−150
−200
10
0
10
1
10
2
10
3
10
4
10
5
10
6
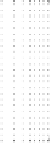
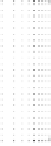
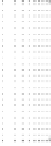
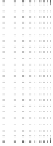
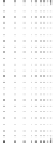
Frequency (rad/s)
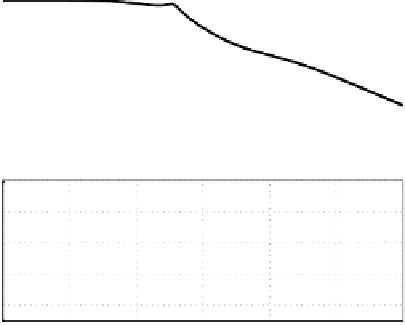
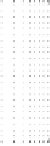
Figure 3.8: The Bode plot actuator with resonant mode controlled by equation
(3.11) with notch filter equation (3.17).
The Bode plots of the controller, sensitivity transfer function S(s), comple-
mentary sensitivity transfer function T (s), and shock transfer function S
h
(s)
are shown in Figures 3.9 - 3.11, and the closed loop step response is shown in
Figure 3.12. It should be noted that the notch filter, being the exact inverse
of the transfer function of the resonant mode, cancels completely the resonant
mode of the plant and, therefore, the zero crossover of the open loop transfer
function can be pushed to higher frequency.
Although this pre-compensator of notch filter produces desirable results for
all responses related to the reference input, it fails to solve the problem for the
response corresponding to the input distubance. One can easily see that the
resonance peak in the open loop transfer is suppressed by the notch filter and
the frequency response of the compensated actuator model resembles that of
the rigid body model of the actuator coupled with the linearized pivot bearing
model. Similar results are obtained for the sensitivity transfer function and the
complementary sensitivity transfer function as they too resemble the responses
of an actuator without resonance. Since the effect of resonance is suppressed,
the step response of the closed loop corresponding to the reference input is
smooth with no visible oscillation. However, the notch filter does not attenuate
the H
∞
-norm of the shock transfer function and a sharp peak is present in the
bode plot of the shock transfer function. This is the transfer function between
the input disturbance and the output of the closed loop system. Because of
the sharp peak at the resonant frequency in the bode plot of the shock transfer
function, any disturbance appearing at the input of the plant, i.e., the force
disturbance, is not sufficiently attenuated and causes oscillations at the output