Hardware Reference
In-Depth Information
10
8
U
−
6
4
S
+
f
PTOS
2
L
0
−2
−4
S
−
−6
U
+
−8
−e
l
e
l
−10
−50
0
50
e
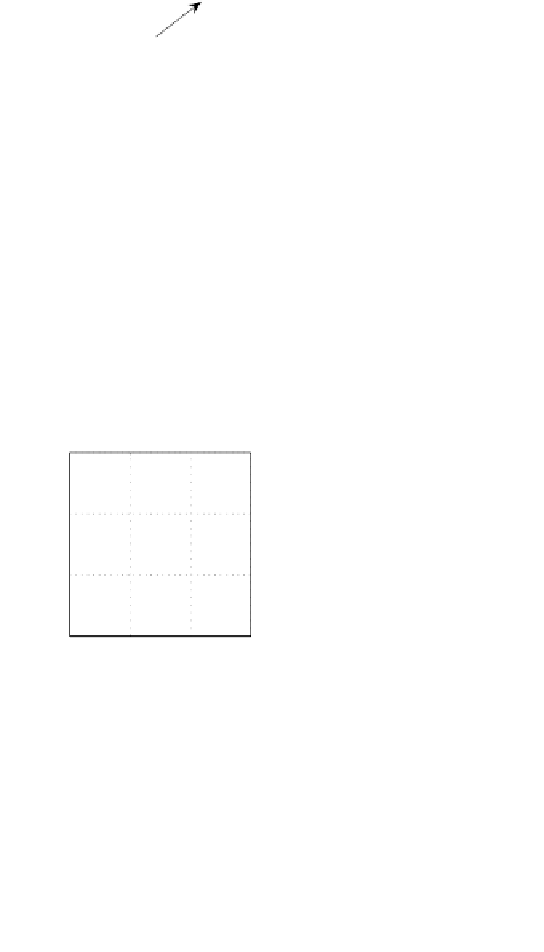
Figure 2.28: Phase plane diagram for proximate time optimal control.
150
6
Command Reference
4
100
2
0
50
−2
−4
0
−6
0
1
2
3
0
1
2
3
Time (ms)
Time (ms)
30
40
20
20
10
0
0
−10
−20
0
1
2
3
−50
0
50
100
Time (ms)
Error (Tracks)
Figure 2.29: Proximate time optimal control: Simulation results.