Information Technology Reference
In-Depth Information
1
0.9
0
0.8
-10
0.7
-20
0.6
-30
value
0.5
-40
0.4
-50
-60
0.3
0.9
1
0.7
0.8
0.5
0.6
0.2
y
0.4
1
0.2
0.3
0.9
0.8
0.7
0.1
0.6
0.5
0.1
0.4
0.3
0
0.1
0.2
0
x
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
(a)
(b)
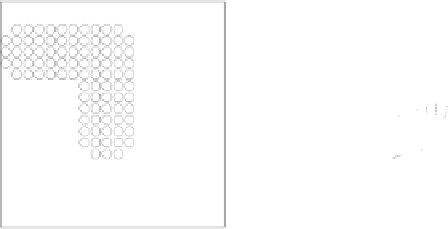
Fig. 2.2.
Optimal policy and value function for a discretised version of the “pudd-
leworld” task [208]. The agent is located on a 1x1 square and can perform steps of
size 0.05 into either of four directions. Each step that the agent performs results in a
reward of -1, expect for actions that cause the agent to end up in a puddle, resulting
in a reward of -20. The zero-reward absorbing goal state is in the upper right corner of
the square. Thus, the task is to reach this state in the smallest number of steps while
avoiding the puddle. The circles in (a) show the location of the puddle. (b) illustrates
the optimal value function for this task, which gives the maximum expected sum of
rewards for each state, and clearly shows the impact of the high negative reward of the
puddle. Knowing this value function allows constructing the optimal policy, as given by
the arrows in (a), by choosing the action in each state that maximises the immediate
reward and the value of the next state.
by the previous hidden state and the performed action. For each such state
transitions the agent receives a scalar
reward
or
payoff
that can depend on the
previous hidden and observable state and the chosen action. The aim of the agent
is to learn which actions to perform in each observed state (called the
policy
)
such that the received reward is maximised in the long run.
Such a task definition is known as a Partially Observable Markov Decision
Process (POMDP) [122]. Its variables and their interaction is illustrated in
Fig. 2.1(a). It is able to describe a large number of seemingly different pro-
blems types. Consider, for example, a rat that needs to find the location of food
in a maze: in this case the rat is the agent and the maze is the environment, and
a reward of -1 is given for each movement that the rat performs until the food
is found, which leads the rat to minimise the number of required movements to
reach the food. A game of chess can also be described by a POMDP, where the
white player becomes the agent, and the black player and the chess board define
the environment. Further examples include path planning, robot control, stock
market prediction, and network routing.
While the POMDP framework allows the specification of complex tasks, fin-
ding their solution is equally complicated. Its diculty arises mostly due to the
agent not having access to the true state of the environment. Thus, most of the
recent work in LCS has focused on a special case of POMDP problems that treat
the hidden and observable states of the environment as equivalent. Such problems













































Search WWH ::

Custom Search