Information Technology Reference
In-Depth Information
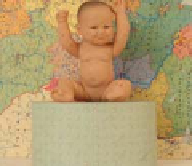
Fig. 4
Left images (Top) of the considered stereo pairs and corresponding ground truth im-
ages (Down). From left to right: Teddy, Baby, Dolls.
Ta b l e 1
Comparative results using different color spaces and the gray level representation
(TV) based method
(GC) based method
Color space
Teddy
Dolls
Baby
Teddy
Dolls
Baby
M
AE
Err
M
AE
Err
M
AE
Err
M
AE
Err
M
AE
Err
M
AE
Err
RGB
0
.
49
3
12
2
0
.
35
3
7
1
0
.
51
3
7
2
0
.
69
3
20
4
0
.
82
3
19
2
0
.
58
1
23
2
Luv
0
.
43
1
11
1
0
.
27
1
8
2
0
.
44
1
4
1
0
.
61
1
11
1
0
.
75
2
19
2
0
.
65
3
21
1
I
1
I
2
I
3
0
.
47
2
12
2
0
.
32
2
10
3
0
.
49
2
7
2
0
.
63
2
14
2
0
.
66
1
18
1
0
.
60
2
24
3
0
.
56
4
17
5
0
.
45
4
15
5
0
.
73
4
14
4
0
.
82
5
25
5
0
.
89
4
24
5
0
.
94
4
26
4
Lab
Gray
0
.
57
5
13
4
0
.
48
5
11
4
0
.
91
5
20
5
0
.
79
4
15
3
0
.
92
5
20
4
1
.
06
5
26
4
evaluated quantitatively using two error measures: the mean absolute error (M
AE
)
between computed and ground truth fields and the percentage of bad matching pix-
els (Err) with absolute error larger than one pixel. The overall results are shown in
Table 1, where the rank of the color spaces according to their M
AE
and Err errors
is also indicated in red. As we can see, the precision of the matching has generally
been improved when using the color information. The mean absolute error was sig-
nificantly reduced when using the Luv, RGB and I
1
I
2
I
3
color spaces. However, no
significant changes in the results have been noticed when using the Lab color space
instead of the gray value information.
In Fig. 5, we show the disparity maps computed by the (TV) and (GC) based
methods for the three stereo pairs, using gray values and the RGB and Luv color
spaces. The obvious utility of color information in solving the stereo matching prob-
lem could be noticed when comparing the results of the gray value based matching
and the color based matching. Indeed, many matching errors are reduced by using