Civil Engineering Reference
In-Depth Information
The frame-scene analysis algorithm depicted in Fig.
6
transforms the events
into a spectrum for each space. The spectrum is the range of observed states that
the space underwent during the observation period. At a specific time instant, we
have a snapshot of that space configuration, that is, a frame. A frame f
i
is a
description of the space configuration at the time instant t
i
. Since a frame may be
valid for a period of time Dt, it is extended to a state s
i
.
The day period is discretised into time slots. At each time slot t
k
, the space is
observed and between t
k
and t
k
þ
1
, it is assumed that the space remains equal. This
time interval Dt is the time slot. For example, if considering 240 time slots per day,
each one will have 6 min. Nevertheless, consecutive time slots may experience the
same state. This raised the creation of a scene, which represents a state remaining
over one or more time slots. Finally, the sequence of all scenes over the obser-
vation period provides the spectrum for each space.
3.4 Model Parameter Estimator
With the frame-scene analysis, it is straightforward to construct the model for each
space. As illustrated in Fig.
7
, the estimation process is responsible for deter-
mining the model parameters a
ij
¼
p
ij
as follows:
8
<
2
4
3
5
i
¼
1
f
ij
;
P
m
f
1
;
1
...
f
1
;
n
f
i
;
j
P
m
f
ij
[ 0
.
.
.
i
¼
1
F
¼
.
.
!
P : p
i
;
j
¼
ð
5
Þ
P
m
:
0
;
f
ij
¼
0
f
m
;
1
... f
m
;
n
i
¼
1
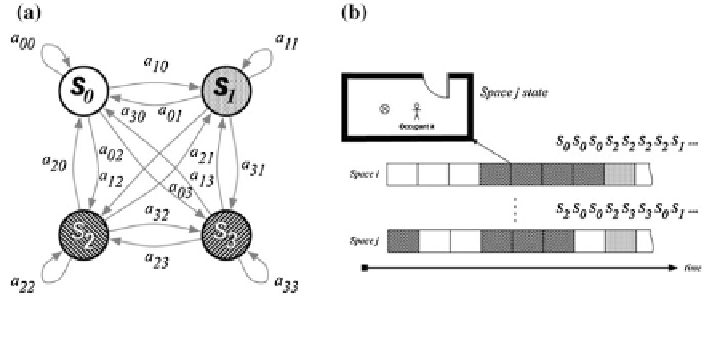
Fig. 7 Markov model for a space. a Example of a MC with four states modelling a space, and
b example of a state sequence generated by the MC