Information Technology Reference
In-Depth Information
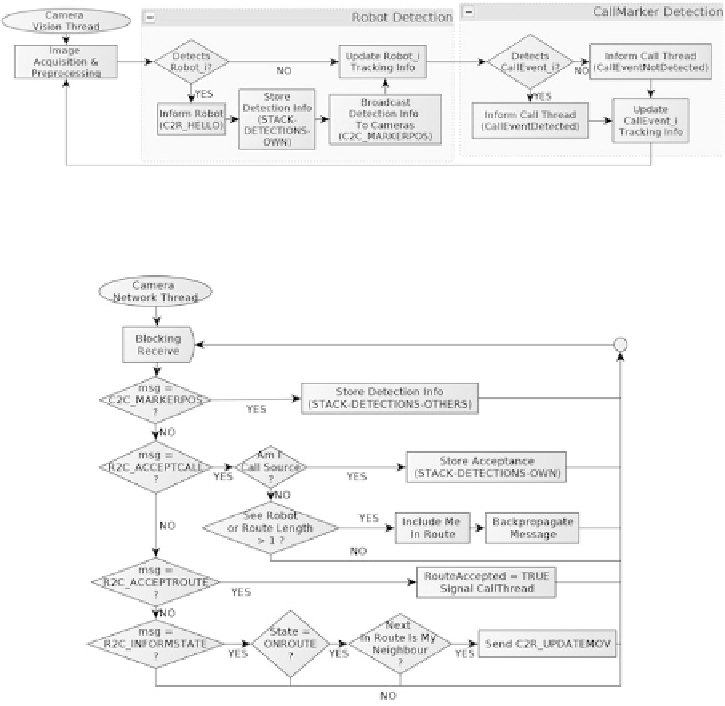
Fig. 3.
Camera's Vision Thread flow chart
Fig. 4.
Camera's Network Thread flow chart
3 Tasks Carried Out by the Camera-Agents
In this section, we will explain the most relevant tasks performed by the cam-
eras to achieve the two main goals described before: dynamic neighbourhood
detection, distributed route planning, and support to robot navigation.
3.1 Dynamic Neighbourhood Detection
As we said before, neighbourhood information plays a key role in our system.
This information is the basis of all local interactions and self-organization pro-
cesses. A camera will consider another camera to be its neighbour if they de-
tect the same events simultaneously; therefore this means that the FOV of two
neighbouring cameras will necessarily overlap (although we plan to remove this
restriction in the future). This overlapping area is called Neighbourhood Re-
gion. After a short period of time, all the cameras deployed in the environment
Search WWH ::

Custom Search