Information Technology Reference
In-Depth Information
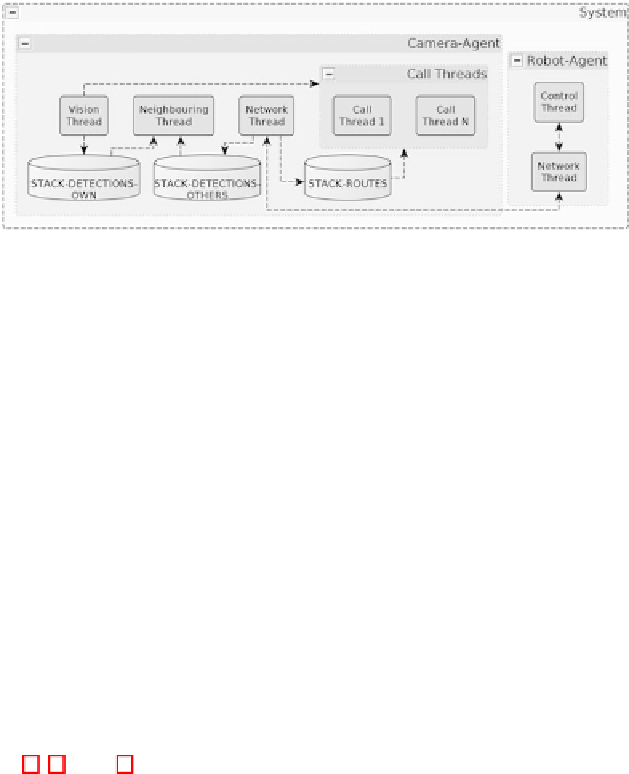
Fig. 2.
General software architecture of the system
-
Vision Thread
: This thread is responsible for the detection and tracking of
both, robots and call events, in the FOV of the camera.
-
Network Thread
: This thread is responsible for the communications with
other agents.
-
Neighborhood Thread
: This thread is responsible for detecting and keeping
information about the neighbourhood relationships with other cameras. As
we will describe later, each camera will detect which part of its covering
area is seen by any other cameras of the system. This allows the dynamic
establishment of neighbourhood relationships and local interactions amongst
the cameras which, as we will see later, are crucial to get routes, or to help
the navigation of the robots.
-
Call Thread
: This thread is responsible for calling the robots whenever there
is call event present in the FOV of a camera. It will also negotiate with the
robots willing to accept the call, and select one of them. This thread ends
either when the robot reaches the event's position or when the event that
started the call disappears. There is one of these threads running on the
camera for each important event detected in the FOV.
Figures 3, 4, and 5 show a schematic work flow for the Vision, Network, and
Call Threads, respectively. These work flows will be further described in Sec. 3.
2.2 Robot
The main goal of the robot is to navigate safely, avoiding obstacles, and attending
call events detected from the cameras. We work with wheeled robots such as the
Pioneer 3DX, equipped with a laser scanner. The software that controls the robot
runs two concurrent threads (Fig. 2): a Network Thread for communications, and
a Control Thread for the robot navigation. The navigation is based on the classic
but robust Potential Fields method: every obstacle in the local environment
around the robot exerts a repulsive force so that the robot avoids any collision,
while any goal exerts an attractive force, so that the robot moves towards it. As
will see later, this goal and therefore the attractive force is provided from the
cameras.
The work flow of the Network Thread is represented in Fig. 6, and a detailed
description of it is given in Sec. 3.



Search WWH ::

Custom Search