Biomedical Engineering Reference
In-Depth Information
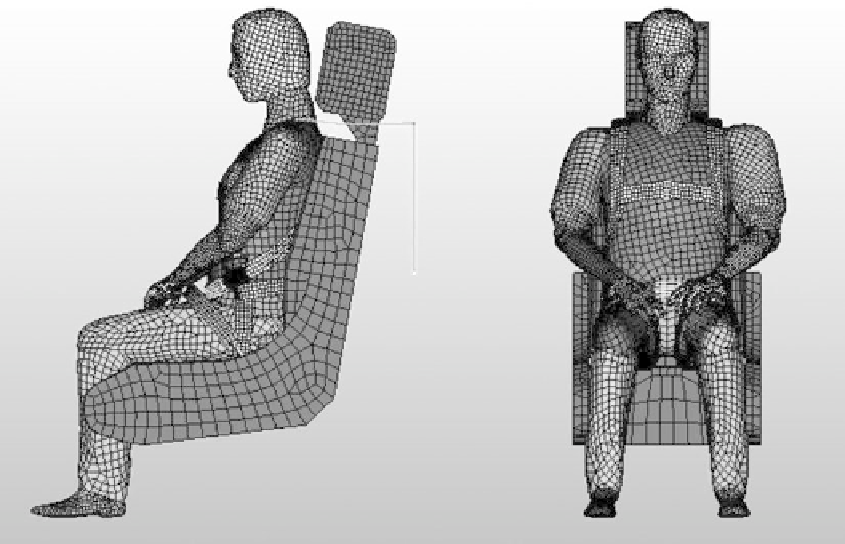
FIgure 18.9
(See color insert.)
Side and front views of a multibody dynamics model, including dummy,
restraint systems, and seat.
The effect of the restraint harness on the pilot can be derived from multibody dynamics. A rigid
body dynamics model of the pilot was developed, having the same weight and height as the subject,
providing the source data to the previous finite element model. This model consists of 16 intercon-
nected rigid segments: head, neck, upper trunk, buttocks, thighs, legs, foots, upper arms, forearms,
and hands. These segments were connected through joints and the properties of each joint, such as
range of motion, stiffness, friction, and dampening, were included. Given the compression effect
of the intervertebral disc under axial loading, the joint connecting the upper and lower torso was
replaced by a spring. The harness restraint was modeled directly in Hypermesh using a belt routing
tool, which makes it convenient to design a safety belt with specific thickness and width along the
surface of the dummy model. The geometric information and material properties of the harness
restraint were derived from military specifications or experimental measurement. The model of the
rigid dummy was adjusted to the required posture according to the purpose of the specific study
and the constraint and boundary conditions were all set correspondingly. The model of a restrained
dummy with pre-ejection posture is shown in Figure 18.9.
The hip joint and thorax can be chosen as sites to evaluate the dynamic response of a restrained
dummy during various impact loadings. The response of these regions can be recorded as the input
data to the finite element model. For the finite element model of the thoracolumbar-pelvis complex,
the imposed loading has the same properties as that applied on the multibody dynamics model.
18.3.4 m
odel
V
alidation
Before the finite element model can be applied to the study of the response of the spine under
various impact loadings, the validity of the model should be verified. The lumbar segment was
chosen for validation due to the lack of experimental data relating to the thoracolumbar spine. The
calibration process of the current model was conducted prior to validation. A calibration factor was
Search WWH ::

Custom Search