Environmental Engineering Reference
In-Depth Information
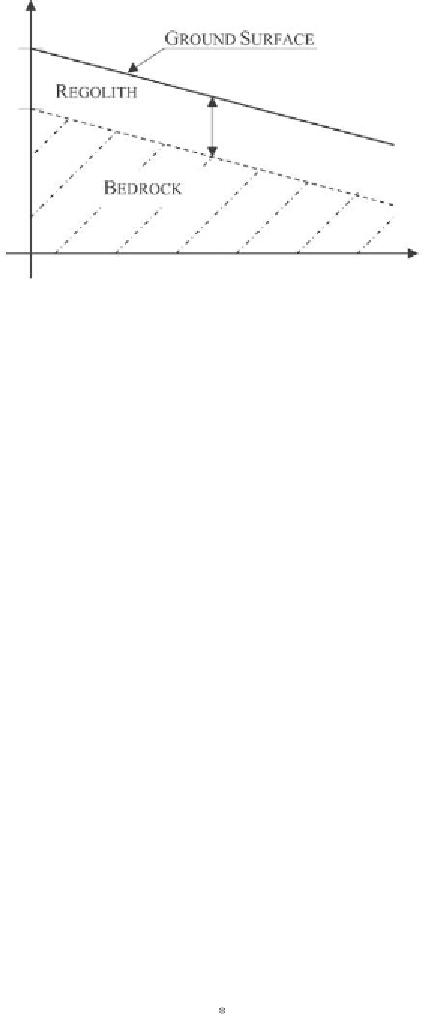
z
r
H
=
z
−
r
y
Figure 4.13. Schematic representation of a soil-mantled slope.
of mass-wasting events. We first consider the case in which regolith thickness
H
does not affect the depth of soil removed by a landslide other than through the bound
h
≤
H
. Thus state dependency in the random driver arises only from this bound, i.e.,
we assume that each landslide removes an exponentially distributed random amount
h
of soil or the whole soil column
H
, whichever is less. The overall dynamics of soil
development can be expressed by (
4.9
) with
g
(
H
)
1 and a truncated distribution
p
(
h
)of
h
,asinFig.
4.14
.If
H
max
is the maximum thickness of the regolith above
which the rates of soil production are negligible, we normalize
H
with respect to
=−
p h
0.8
1
α
e
h
α
p h
0.6
e
h
α
0.4
P h
h
0.2
h
h
Figure 4.14. Probability distribution
p
(
h
)of
h
truncated at
h
∗
(
H
). The distribution
is exponential for 0
=
h
∗
(
H
) equal to the probability that
h
exceeds
h
∗
(
H
) in the nontruncated exponential
distribution (shaded area in this figure).
p
(
h
) is clearly state dependent.
<
<
h
∗
(
H
) and has a probability mass (or “atom”)
P
∗
at
h
h

















Search WWH ::

Custom Search