Information Technology Reference
In-Depth Information
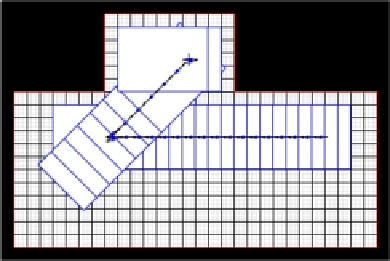
different situations and it has generated interesting solutions. In Fig. 7, two
examples of robots maneuvers are shown: a) a classic car-like robot parking; b)
the motion of an L-Robot in a real cluttered word. These are only the solutions
found with a set of costs for the movements: if we change the relative weight of
the movements, without changing the type of kinematics, other solutions can be
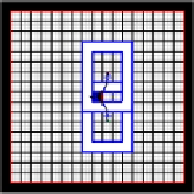
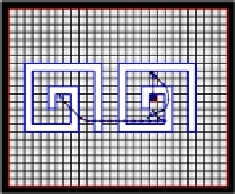
found. In Fig. 8, other examples involving the motion of objects around a peg
are shown. It is noteworthy that the obstacles are never overlapped by the robot
silhouette, thanks to the algorithm used in the repulsive layer (Obstacles L.).
a)
b)
Fig. 7.
Maneuvering examples: a) parking a rectangular Robot; b) a complex path of
a L-Robot in a cluttered world
a)
b)
c)
Fig. 8.
Maneuvering around a peg: a) U-Robot; b) O-Robot with a peg inside; c) Spiral
Robot inserting around a peg;
5.3 Multiple Starting and Goal Positions
Another property of this algorithm is to compute in parallel the trajectories from
more than one starting position. In Fig. 9.a, a new starting point is added in the