Information Technology Reference
In-Depth Information
5.1 Robots with Different Kinematics
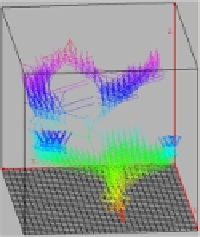
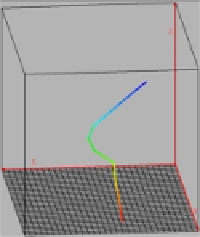
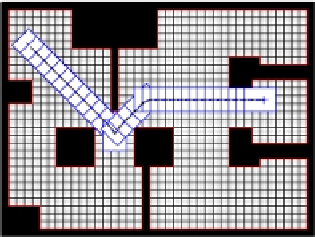
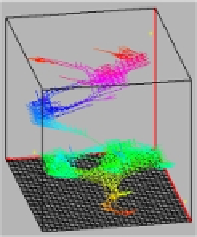
In Fig. 6 are shown the solutions of a path-planning problem in a more complex
environment using two different kinematics. In the first example the robot can
move only forward. To reach the goal it has to turn around an obstacle to drive
through the narrow passage. In the second, the robot can also move backward
a)
b)
c)
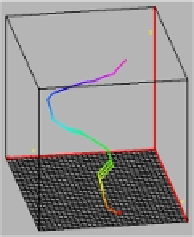
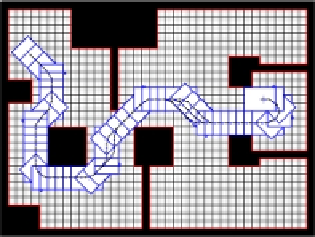
Fig. 6.
An example of a more complex world: a) Attraction Potentials Skeleton; b)
Paths Skeleton; c) Trajectory, for robots kinematics with and without backward move-
ments respectively
and rotate in the same place. Exploiting this kinematics, the first part of the
trajectory is followed moving forward until the robot reaches the narrow passage,
then in the second part it moves backward up to the goal. The results show that a
robot, rotating also in the same place, has a wider set of alternative trajectories.
The performance tests, carried out with an Intel Pentium III 1 GHz PC, gives
the following results: 78.2 ms and 43.1 ms respectively. These mean times are
evaluated over 1,000 experiments for each problem and include the initialization
phase of each test.
5.2 Maneuvering Examples
In this section are reported just few experiments to highlight the flexibility of
this planner. It has been used with robots/objects with different shapes, facing