Information Technology Reference
In-Depth Information
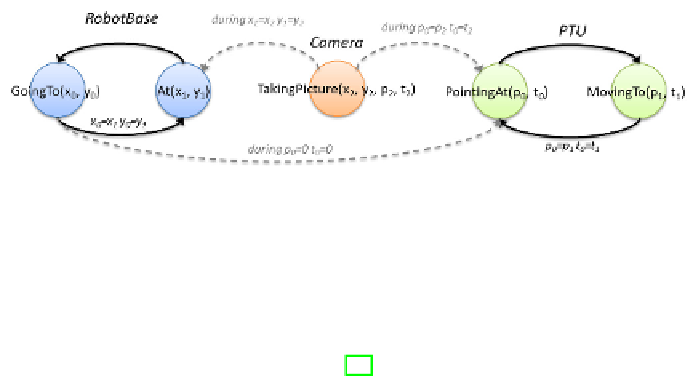
Fig. 4.
State variables and resources describing the robotic platform and the communication chan-
nel availability
5
Evaluating the Planners
We now present a comparative evaluation of the three planners with respect to a robotic
domain extracted from the GOAC project [20]. The domain is based on a robotic plat-
form responsible for the movements, a payload represented by stereocameras mounted
on a Pan-Tilt Unit, and a communication facility. We have devised two set of test do-
mains: a simplified one (GOAC-
lite
) which focuses on the basic causality between plat-
form and payload; a very realistic one (GOAC-
plus
) which represents a quite detailed
picture of the scenario.
GOAC-
lite
.
The basic domain contains the knowledge shown in Figure 4. The figure
details the values that can be assumed by state variables and the legal value transitions in
accordance with the mission requirements and the robot physics. To obtain a timeline-
based specification of our robotic domain, we use three state variables, namely,
Robot-
Base
,
PTU
and
Camera
. The robot can be in a position (
At
(
x, y
)
)ormovingtowards
a destination (
GoingTo
(
x, y
)
). The PTU can assume a
PointingAt
(
pan,tilt
)
value if
pointing a certain direction, while, when moving, it assumes a
MovingTo
(
pan,tilt
)
value. Finally, the camera can take a picture (
TackingPicture
(
x, y, p, t
)
)ofagiven
object in a position
.
We can see how the causality concern the synchronization over time of (i) the PTU
being in a safe position (pan and tilt at 0) while the robot is moving, (ii) to take a picture
the robot must be still in one of the requested locations and the PTU should be pointing
at the related direction. Compatibilities express the following: (i)
GoingTo
(
x, y
)
must
occur during
PointingAt
(0
,
0)
; (ii)
TakingPicture(x, y, pan, tilt)
must occur during
At
(
x, y
)
and
PointingAt
(
pan,tilt
)
;
The three planners were run on problems having an increasing number of temporally
unconstrained “TakingPicture” goals (a bunch of targets to return picture of). Figure
5 shows execution time (in milliseconds) of our benchmark problem (the number of
TakingPicture
goals are on the abscissas). We can see that the overhead added by the
SAT encoding of the qualitative temporal network (the J-
TRE
(smt)
planner) exceeds
the benefits of search space pruning that derives from it. The overhead added in the J-
TRE
(stp)
planner, on the other side, allows good search space pruning and outperforms
other planners even on small problem instances.
x, y
with the PTU in
pan,tilt
GOAC-
plus
.
The second domain is a rather detailed version of the real domain. We
have modeled: the visibility windows to communicate with the relay satellite that sends